This notebook simulates the evolution of a three-species system with long-range dispersal, where individuals are modeled as gas molecules, and interactions occur between any pair.
Theoretical framework
Discrete-time model
Let’s consider a model world that has \(N\) available sites. The sites are occupied by three species, namely species \(r\) (rock), \(s\) (scissors) and \(p\) (paper), which occur in the proportions \(n_r\) , \(n_s\) and \(n_p\) (with \(n_r + n_s + n_p = 1\)). Two sites are chosen at each time-step. The occupant of the first replicates into the second with a given probability - individual of species \(r\) can invade a species \(s\) with probability \(P_r\), a species \(s\) invades a species \(p\) with probability \(P_s\), a species \(p\) invades a species \(r\) with probability \(P_p\) and all other invasion probabilities are zero. This dynamic may represent individuals competing for food: the winner consumes the food and gains enough resources to reproduce asexually, while the loser dies.
Continuous-time model
In the limit of large \(N\), the rate of change of species population density is given by the following mean-field equations
where the system dynamic is approximated considering the average effect of interactions rather than tracking every specific interaction (hence the term mean-field).
For example, in the first equation, \(n_s\cdot P_r\) represents the rate at which the rock species increases due to its successful invasion of the scissors species, while \(n_p\cdot P_p\) represents the rate at which the rock species decreases due to the successful invasion of the paper species. The difference between these terms is then multiplied by the population density of the rock species to ensure that the rate of change is properly scaled according to the availability of species \(r\). Similar considerations apply to the other equations.
Note that in these equations a unit of time \(t\) is \(N\) individual time-steps, which we refer to as an epoch.
Fixed-point analysis
Trivial fixed points of the system are <\(n_r=0, n_s=0, n_p=1\)>, <\(n_r=0, n_s=1, n_p=0\)> and <\(n_r=1, n_s=0, n_p=0\)>.
The non-trivial fixed point is obtained by setting the rates of change to zero:
\[\begin{cases}
n_s=1-\frac{n_s\cdot P_r}{P_p}-\frac{n_s\cdot P_s}{P_p}\implies n_s=\frac{P_p}{P_p+P_r+P_s}&\text{(6), substituting (4) into (5)}\\
n_p=\frac{n_s\cdot P_r}{P_p}=\frac{\cancel{P_p}\cdot P_r}{\cancel{P_p}\cdot (P_p+P_r+P_s)}=\frac{P_r}{P_p+P_r+P_s}&\text{(7), substituting (6) into (1)}\\
n_r=\frac{n_p\cdot P_s}{P_r}=\frac{\cancel{P_r}\cdot P_s}{\cancel{P_r}\cdot (P_p+P_r+P_s)}=\frac{P_s}{P_p+P_r+P_s}&\text{(8), substituting (7) into (2)}\\
\end{cases}\]
The population densities at the fixed point are controlled by the invasion rate of the species they invade (the fixed point population of species \(r\) depends on the invasion rate of species \(s\), the fixed point population of species \(s\) depends on the invasion rate of species \(p\) and the fixed point population of species \(p\) depends on the invasion rate of species \(r\)). As a consequence, the most aggressive species never has the highest fixed-point population. Moreover, if the invasion probabilities of two species are held steady, then a decrease in the competitive ability of the third leads to an increase in its fixed-point population. For example, if the invasion rate of species \(p\) decreases, then the population at the fixed point of species \(s\) decreases and since there are less \(s\) individuals invading species \(p\), the population of \(p\) increases.
Experiments
Importing the necessary libraries:
Code
import sysimport numpyimport numpy as npimport pandas as pdimport matplotlib.pyplot as pltimport plotly.express as pximport plotly.graph_objects as gofrom matplotlib import colormapsfrom scipy.integrate import odeintfrom graphviz import Sourcefrom sympy import symbols, Matrix, Eq, solvenp.random.seed(0)
Discrete-time model
Finite population size
Defining a function to simulate the evolution of the system for a world with \(N\) sites:
Code
def simulate_discrete_finite_N(Pr, Ps, Pp, nr_init, ns_init, N=1000, epochs=100):''' Simulate the evolution of a three-species population over time using a discrete-time model on a world with N available sites. Parameters ---------- Pr : float The probability that a species of type r invades a species of type s. Ps : float The probability that a species of type s invades a species of type p. Pp : float The probability that a species of type p invades a species of type r. nr_init : float The initial proportion of species r in the population. ns_init : float The initial proportion of species s in the population. N : int The number of sites. epochs : int The number of epochs to simulate. '''def check_P(P):if P <0or P >1:raiseValueError('Pr, Ps and Pp must be between 0 and 1') check_P(Pr) check_P(Ps) check_P(Pp)if nr_init + ns_init >1:raiseValueError('Initial species proportions must be less than 1')if N <1:raiseValueError('Number of sites must be at least 1')if epochs <1:raiseValueError('Number of epochs must be at least 1') sites = numpy.zeros(N) nr = [] ns = [] np = [] r_id =1 s_id =2 p_id =3# Initialize the sitesfor i inrange(N): sites[i] = numpy.random.choice([r_id, s_id, p_id], p=[nr_init, ns_init, 1-nr_init-ns_init]) nr.append(numpy.sum(sites == r_id) / N) ns.append(numpy.sum(sites == s_id) / N) np.append(numpy.sum(sites == p_id) / N)for t inrange(1, epochs):for step inrange(N):# choose two random sites i = numpy.random.randint(0, N) j = numpy.random.randint(0, N)if sites[i] == r_id and sites[j] == s_id: # rock beats scissorsif numpy.random.rand() < Pr: sites[j] = r_idelif sites[i] == s_id and sites[j] == p_id: # scissors beats paperif numpy.random.rand() < Ps: sites[j] = s_idelif sites[i] == p_id and sites[j] == r_id: # paper beats rockif numpy.random.rand() < Pp: sites[j] = p_id nr.append(numpy.sum(sites == r_id) / N) ns.append(numpy.sum(sites == s_id) / N) np.append(numpy.sum(sites == p_id) / N)# if two species go extinct, stop the simulationifsum([numpy.isclose(nr[-1], 0, 1e-4), numpy.isclose(ns[-1], 0, 1e-4), numpy.isclose(np[-1], 0, 1e-4) ]) >=2:breakreturn pd.DataFrame({'$n_r$': nr, '$n_s$': ns, '$n_p$': np})
Defining functions to plot the evolution of the system:
Code
def line_plot_species_evolution(df, title=None, show_markers=True):''' Plot the evolution of species proportions over time in a line plot. Parameters ---------- df : pd.DataFrame A DataFrame containing the species proportions over time. title : str The title of the plot. show_markers : bool Whether to show markers on the plot. ''' df.plot( figsize=(12, 4), style='o-'if show_markers else'-', color=['tab:red', 'purple', 'gold'], title=title, xlabel='Time', ylabel='Fraction of individuals' );def phase_plot_species_evolution(df, title=None):''' Plot the evolution of species proportions over time in a phase plot. Parameters ---------- df : pd.DataFrame A DataFrame containing the species proportions over time. title : str The title of the plot. ''' fig, axs = plt.subplots(1, 3, figsize=(15, 5), sharey=True, sharex=True) cmap = colormaps['Blues'] colors = cmap(np.linspace(0, 1, (df[df.columns[0]].shape[0]-1))) for i inrange(3): axs[i].plot(df[df.columns[i]][0:-1], df[df.columns[i]][1:], '-', color='k', zorder=1) axs[i].scatter(df[df.columns[i]][0:-1], df[df.columns[i]][1:], c=colors, s=50, zorder=2, edgecolor='black') axs[i].set_title(df.columns[i]) fig.suptitle(title); fig.tight_layout()def ternary_plot_species_evolution(df, title=None, show_markers=True):''' Plot the evolution of species proportions over time in a ternary plot. Parameters ---------- df : pd.DataFrame A DataFrame containing the species proportions over time. title : str The title of the plot. show_markers : bool Whether to show markers on the plot. ''' fig = px.scatter_ternary( df, a=df.columns[2], b=df.columns[0], c=df.columns[1], color=df.index, color_continuous_scale='blues', size_max=10, title=title )if show_markers: fig.update_traces(mode='lines+markers', line=dict(color='black', width=1), marker=dict(symbol='circle', line=dict(width=1, color='black')))else: fig.update_traces(mode='lines', line=dict(color='black', width=1)) fig.update_layout(coloraxis_colorbar=dict(title='Time')) fig.show('png')
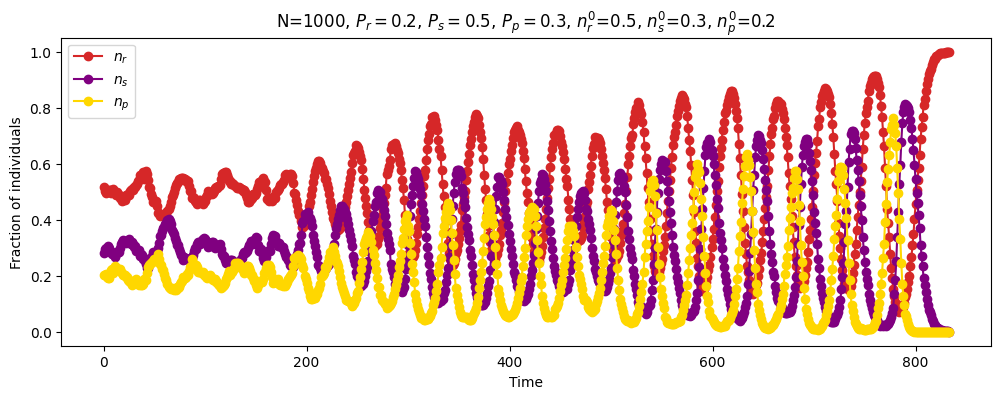
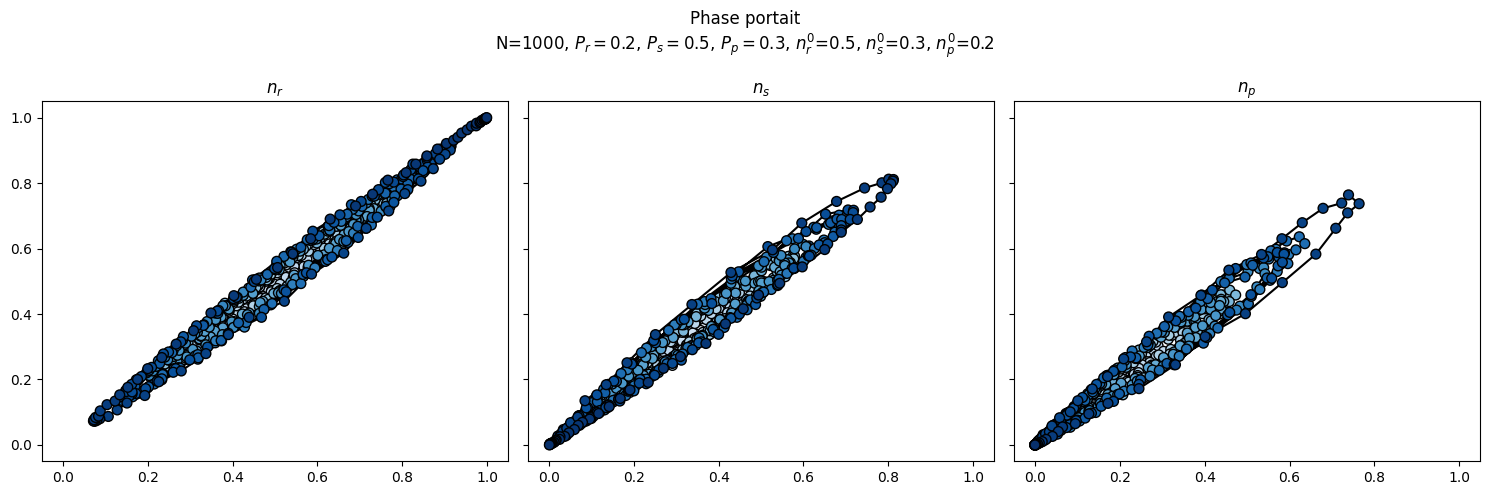
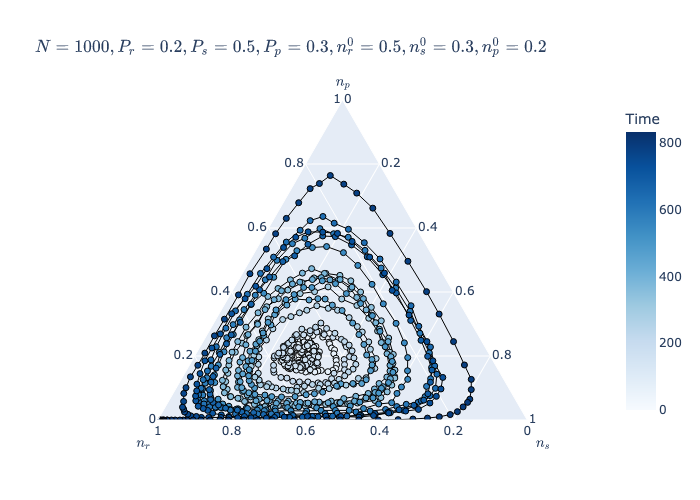
Simulating the evolution of the system with \(P_r = 0.2\), \(P_s = 0.5\), \(P_p = 0.3\), \(N = 1000\), initialized with population densities closed to the fixed point (\(n_r=0.5\), \(n_s=0.3\), \(n_p=0.2\)):
In a finite world, the populations oscillate with increasing amplitude, with two species (scissors and paper) eventually becoming extinct. The species that survives (rock) is the one that has the lowest invasion rate.
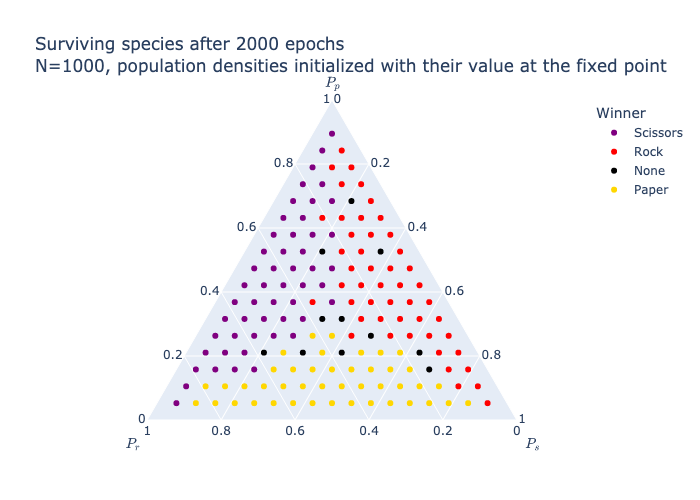
Performing simulations for a range of invasion probabilities chosen to sum to unity, initializing the population densities close to the fixed point and recording the surviving species:
Code
# defining a grid of points for invasion probabilitiesR, S = np.mgrid[0:1:20j, 0:1:20j]R, S = R.ravel(), S.ravel()P =1- R - SI = np.array([R, S, P]).T# keeping only invasion probabilities greater than 0.01I = I[np.all(I >0.01, axis=1)]R = I[:, 0]S = I[:, 1]P = I[:, 2]# total number of simulations to runnum_sim =len(I)# number of sites N =1000# maximum number of iterationsEPOCHS =2000# list to store the winner of each simulationwinners = []# function to print a progress bardef print_progress_bar(iteration, total, length=50): percent =f"{100* (iteration /float(total)):.1f}" filled_length =int(length * iteration // total) bar ='='* filled_length +'-'* (length - filled_length) sys.stdout.write(f'\rProgress: |{bar}| {percent}% Complete') sys.stdout.flush()# iterating over the invasion probabilitiesfor i, (Pr, Ps, Pp) inenumerate(I): print_progress_bar(i+1, num_sim) results_df = simulate_discrete_finite_N( Pr=Pr, Ps=Ps, Pp=Pp, nr_init=Ps, ns_init=Pp, N=N, epochs=EPOCHS )# storing the winnerif results_df.index.stop==EPOCHS: # no winner winners.append('None')elif np.isclose(results_df.iloc[-1]['$n_r$'], 1, 1e-4): # rock wins winners.append('Rock')elif np.isclose(results_df.iloc[-1]['$n_s$'], 1, 1e-4): # scissors wins winners.append('Scissors')else: # paper wins winners.append('Paper')
Plotting the surviving species on a ternary plot (replicating Figure 1c from [1]):
Code
fig = px.scatter_ternary( pd.DataFrame(I, columns=['$P_r$', '$P_s$', '$P_p$']), a="$P_p$", b="$P_r$", c="$P_s$", size_max=10, title=f"Surviving species after {EPOCHS} epochs<br>N={N}, population densities initialized with their value at the fixed point", color = winners, color_discrete_map={'None': 'black', 'Rock': 'red', 'Scissors': 'purple', 'Paper': 'gold'} )fig.update_layout(legend_title_text='Winner')fig.show('png')
The weakest competitor is most likely to survive.
Large population size
To transform the differential equations describing the system under the large \(N\) assumption into discrete-time recurrence relations, we approximate the derivative \(\frac{\partial n_r}{\partial t}\) by the difference between the population densities at consecutive time steps
Defining a function to simulate the evolution of the system of recurrent equations under the large \(N\) assumption:
Code
def simulate_discrete_large_N(Pr, Ps, Pp, nr_init, ns_init, delta_t=0.001, epochs=1000):''' Simulate the evolution of a population of three species over time using the recurrence relations under the large N assumption. Parameters ---------- Pr : float The probability that a species of type r invades a species of type s. Ps : float The probability that a species of type s invades a species of type p. Pp : float The probability that a species of type p invades a species of type r. nr_init : float The initial proportion of species r in the population. ns_init : float The initial proportion of species s in the population. delta_t : float The time step size. epochs : int The number of time steps to simulate. '''def check_P(P):if P <0or P >1:raiseValueError('Pr, Ps and Pp must be between 0 and 1') check_P(Pr) check_P(Ps) check_P(Pp)if nr_init + ns_init >1:raiseValueError('Initial species proportions must be less than 1')if epochs <1:raiseValueError('Number of steps must be at least 1') nr = [] ns = [] np = [] nr.append(nr_init) ns.append(ns_init) np.append(1- nr_init - ns_init)for _ inrange(0, epochs-1): nr.append(nr[-1] + nr[-1]*delta_t*(ns[-1]*Pr - np[-1]*Pp)) ns.append(ns[-1] + ns[-1]*delta_t*(np[-1]*Ps - nr[-2]*Pr)) # use nr from the previous time step np.append(1- nr[-1] - ns[-1])# if two species go extinct, stop the simulationifsum([numpy.isclose(nr[-1], 0, 1e-4), numpy.isclose(ns[-1], 0, 1e-4), numpy.isclose(np[-1], 0, 1e-4)]) >=2:breakreturn pd.DataFrame({'$n_r$': nr, '$n_s$': ns, '$n_p$': np})
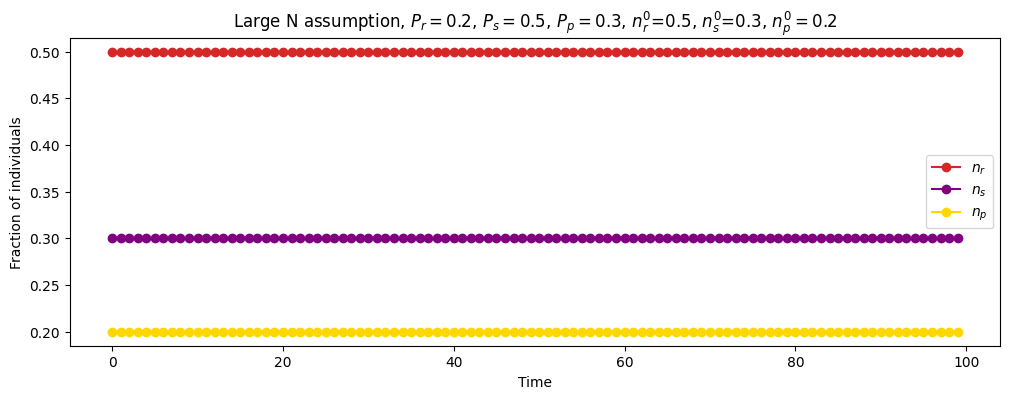
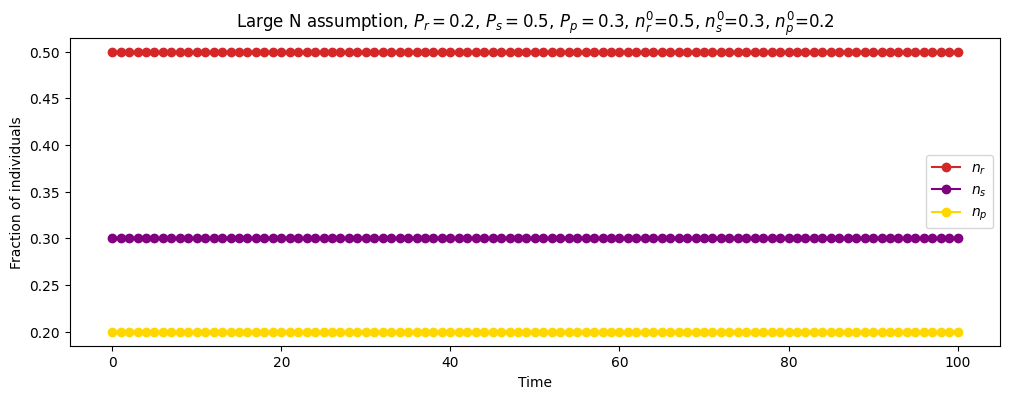
Simulating the evolution of the system of recurrent equations under the large \(N\) assumption with \(P_r = 0.2\), \(P_s = 0.5\), \(P_p = 0.3\), initialized with population densities close to the fixed point (\(n_r=0.5\), \(n_s=0.3\), \(n_p=0.2\)):
By initializing the population densities equal to the fixed point, the system remains at the fixed point.
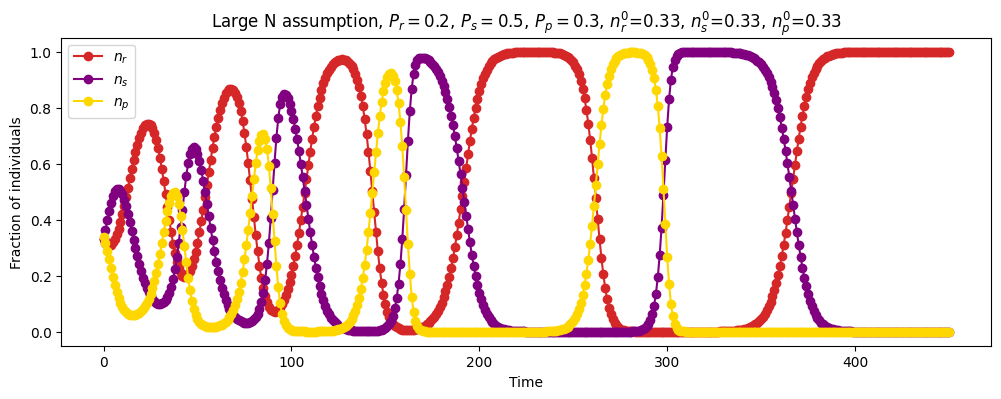
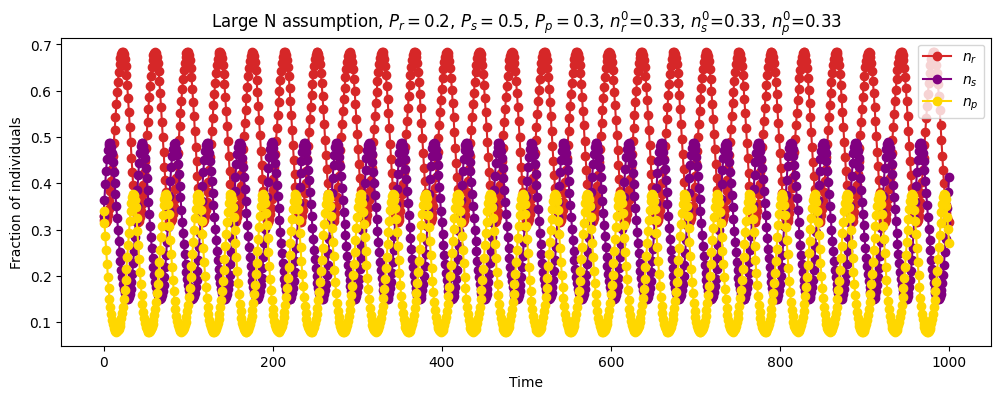
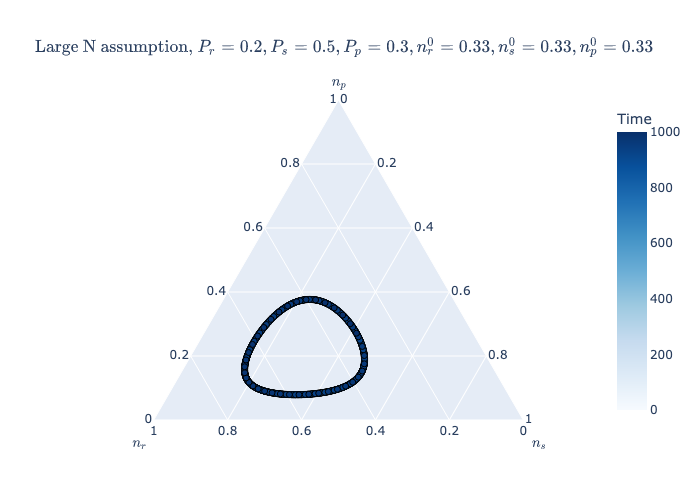
Simulating the evolution of the system of recurrent equations under the large \(N\) assumption with \(P_r = 0.2\), \(P_s = 0.5\), \(P_p = 0.3\), initialized with equal population densities (\(n_r=0.33\), \(n_s=0.33\), \(n_p=0.33\)) and using \(\Delta_t=1\):
In the limit that the total number of sites is large, the populations exhibit sustained oscillations, moving along a periodic orbit around the fixed point (\(n_r=0.5, n_s=0.3, n_p=0.2\)).
Continuous-time model
To enhance accuracy, we simulate the system’s evolution by solving the differential equations that define it.
The odeint method from scipy.integrate solves a system of ordinary differential equations using lsoda from the FORTRAN library odepack. This library uses the Adams/BDF method with automatic stiffness detection.
Code
def RSP_ODE_solver(t, P, x0):''' Solve the RSP ODE system. '''def RSP(x, t, P): nr = x[0] Pr = P[0] ns = x[1] Ps = P[1] np =1- nr - ns Pp = P[2] d_nr_dt = nr*(ns*Pr - np*Pp) d_ns_dt = ns*(np*Ps - nr*Pr)return [d_nr_dt, d_ns_dt] y = odeint(RSP, x0, t, args=(P,)) results_df = pd.DataFrame(y, columns=['$n_r$', '$n_s$']) results_df['$n_p$'] =1- results_df['$n_r$'] - results_df['$n_s$']return results_dfdef simulate_continuous(t, Pr, Ps, Pp, nr_init, ns_init):''' Simulate the evolution of a population of three species over time in the continuous setting, solving the ODE system. '''if nr_init + ns_init >1:raiseValueError('Initial species proportions must be less than 1')def check_P(P):if P <0or P >1:raiseValueError('P_r, P_s and P_p must be between 0 and 1') check_P(Pr) check_P(Ps) check_P(Pp) P = [Pr, Ps, Pp] x0 = [nr_init, ns_init] s = RSP_ODE_solver(t, P, x0)return s
Simulating the evolution of the system in the continuous setting with \(P_r = 0.2\), \(P_s = 0.5\), \(P_p = 0.3\), initialized with population densities close to the fixed point (\(n_r=0.5\), \(n_s=0.3\), \(n_p=0.2\)):
As in the discrete time setting, by initializing the population densities equal to the fixed point, the system remains at the fixed point.
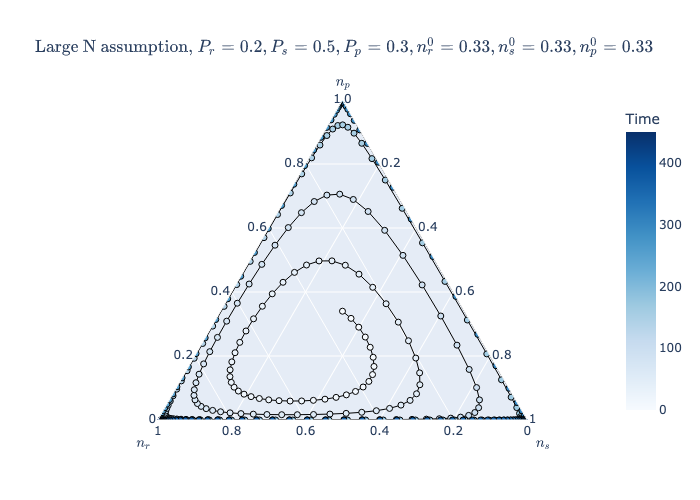
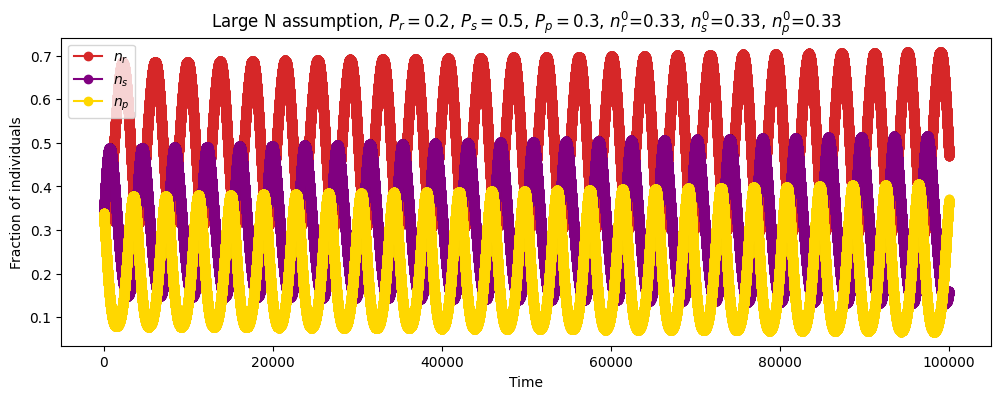
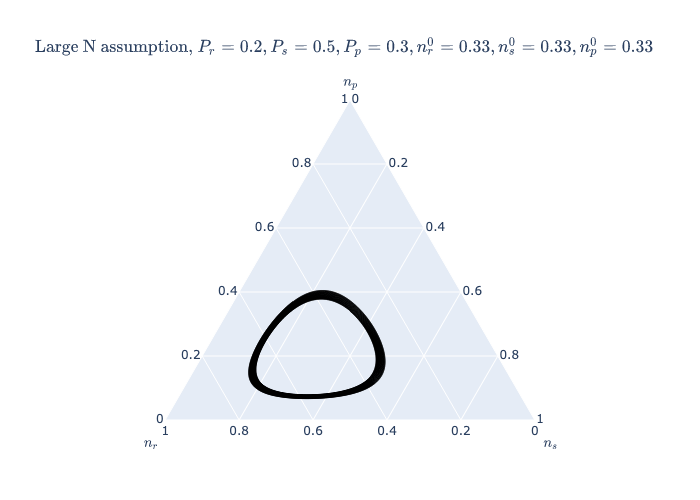
Simulating the evolution of the system in the continuous setting with \(P_r = 0.2\), \(P_s = 0.5\), \(P_p = 0.3\), initialized with equal population densities (\(n_r=0.33\), \(n_s=0.33\), \(n_p=0.33\)):
Again, the populations move along a periodic orbit around the fixed point.
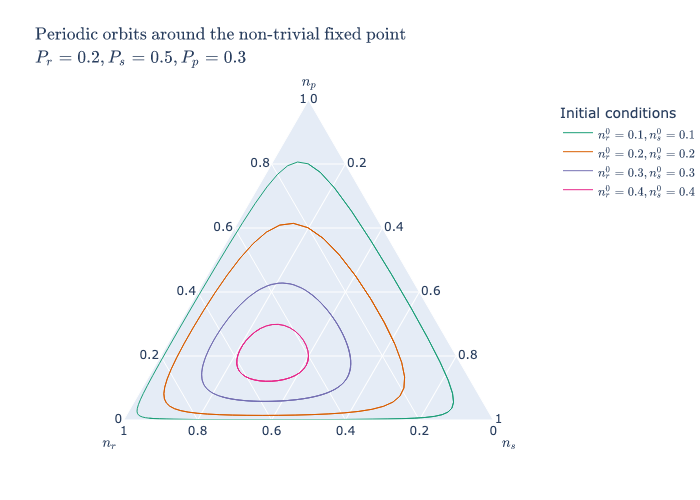
Performing simulations for different initial population densities and plotting the orbits on a ternary plot (replicating Figure 1a from [1]):
Code
fig = go.Figure()# iterating over initial proportionsfor i, init inenumerate([0.1, 0.2, 0.3, 0.4]):# simulate the system df = simulate_continuous(t=np.linspace(0,100,101), Pr=0.2, Ps=0.5, Pp=0.3, nr_init=init, ns_init=init)# plot the trajectory fig.add_trace(go.Scatterternary( mode='lines', a=df['$n_p$'], b=df['$n_r$'], c=df['$n_s$'], name=f'$n_r^0={init}, n_s^0={init}$', line=dict(color=px.colors.qualitative.Dark2[i], width=1) ))fig.update_layout( ternary=dict( aaxis_title='$n_p$', baxis_title='$n_r$', caxis_title='$n_s$' ), title=r"$\text{Periodic orbits around the non-trivial fixed point}\\P_r=0.2, P_s=0.5, P_p=0.3$", legend=dict( title='Initial conditions' ))fig.show('png')
The quantity \(\lambda=(\frac{n_r}{R})^R(\frac{n_s}{S})^S(\frac{n_p}{P})^P\), where \(R\), \(S\) and \(P\) represent the population densities of species \(r\), \(s\) and \(p\) at the fixed point, is invariant along each orbit, with \(\lambda=1\) when the populations are at the fixed point and \(\lambda=0\) when one or more of the species become extinct [2].
While ODEs are deterministic and do not account for fluctuations in population densities, stochastic simulation methods offer greater accuracy, especially for systems with small populations. Furthermore, unlike discrete time simulations, stochastic simulations use an exponential probability distribution to model the time between subsequent occurrences of an event.
To perform stochastic simulations, we need to translate the ODE system
into a system of chemical reactions, by constructing one reaction for each term of the equations as follows
\[\begin{cases}
\textcolor{violet}{R + S \xrightarrow{P_r} S + 2R}\\
\textcolor{gold}{R + P \xrightarrow{P_p} P}\\
\textcolor{cyan}{S + P \xrightarrow{P_s} P + 2S}\\
\textcolor{orange}{S + R \xrightarrow{P_r} R}\\
\textcolor{palegreen}{P + R \xrightarrow{P_p} R + 2P}\\
\textcolor{red}{P + S \xrightarrow{P_s} S}\\
\end{cases}\]
where we use the capital letters \(R, S, P\) to denote the species rock, scissors and paper respectively.
We can simplify the system by noting, for example, that the terms \(\textcolor{violet}{n_r\cdot n_s\cdot P_r}\) and \(\textcolor{orange}{n_s\cdot n_r \cdot P_r}\) can be represented by the same reaction (i.e., when an \(R\) individual wins, it reproduces while the losing \(S\) individual dies). Thus, we can combine these into a single reaction and apply the same process to similar terms, resulting in the following system:
\[\begin{cases}
R + S \xrightarrow{P_r} 2R\\
S + P \xrightarrow{P_s} 2S\\
P + R \xrightarrow{P_p} 2P\\
\end{cases}\]
We will use StochPy, a Python package for stochastic simulation of chemical reactions:
Code
import stochpy
#######################################################################
# #
# Welcome to the interactive StochPy environment #
# #
#######################################################################
# StochPy: Stochastic modeling in Python #
# http://stochpy.sourceforge.net #
# Copyright(C) T.R Maarleveld, B.G. Olivier, F.J Bruggeman 2010-2015 #
# DOI: 10.1371/journal.pone.0079345 #
# Email: tmd200@users.sourceforge.net #
# VU University, Amsterdam, Netherlands #
# Centrum Wiskunde Informatica, Amsterdam, Netherlands #
# StochPy is distributed under the BSD licence. #
#######################################################################
Version 2.4.0
Output Directory: /Users/irenetesta/Stochpy
Model Directory: /Users/irenetesta/Stochpy/pscmodels
To describe a system of chemical reaction, StochPy uses the PySCeS MDL, an ASCII text based input file. We defined the system using such format and saved it in the file ../long_range_models/RSP_model.psc:
Code
!cat ../long_range_models/RSP_model.psc
# Rock Scissors Paper model
# R + S --> 2R, Pr
# P + R --> 2P, Pp
# S + P --> 2S, Ps
R1:
R + S > R + R
R*S*Pr
R2:
S + P > S + S
S*P*Ps
R3:
P + R > P + P
P*R*Pp
# Parameters
Pr = 0.2
Ps = 0.5
Pp = 0.3
# Init Values
R = 33
S = 33
P = 33
Info: Direct method is selected to perform stochastic simulations.
Parsing file: /Users/irenetesta/Stochpy/pscmodels/ImmigrationDeath.psc
Info: No reagents have been fixed
Parsing file: ../long_range_models/RSP_model.psc
Info: No reagents have been fixed
['R', 'S', 'P']
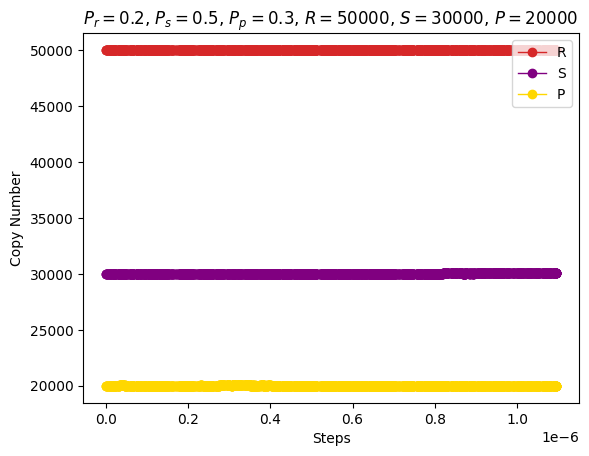
Setting initial conditions (close to the fixed point) and parameters, using a high number of copies for each species to approximate the deterministic behavior, thereby verifying the consistency between the ODE and stochastic models:
The method to perform a stochastic simulation is DoStochSim:
Code
help(smod.DoStochSim)
Help on method DoStochSim in module stochpy.modules.StochSim:
DoStochSim(end=False, mode=False, method=False, trajectories=False, epsilon=0.03, IsTrackPropensities=False, rate_selection=None, species_selection=None, IsOnlyLastTimepoint=False, critical_reactions=[], reaction_orders=False, species_HORs=False, species_max_influence=False, quiet=False) method of stochpy.modules.StochSim.SSA instance
Run a stochastic simulation for until `end` is reached. This can be either time steps or end time (which could be a *HUGE* number of steps).
Input:
- *end* [default=1000] (float) simulation end (steps or time)
- *mode* [default='steps'] (string) simulation mode, can be one of: ['steps','time']
- *method* [default='Direct'] (string) stochastic algorithm ['Direct', 'FRM', 'NRM', 'TauLeap']
- *trajectories* [default = 1] (integer)
- *epsilon* [default = 0.03] (float) parameter for the tau-leap method
- *IsTrackPropensities* [default = False]
- *rate_selection* [default = None] (list) of names of rates to store. This saves memory space and prevents Memory Errors when propensities propensities are tracked
- *species_selection* [default = None] (list) of names of species to store. This saves memory space and prevents Memory Errors (occurring at ~15 species).
- *IsOnlyLastTimepoint* [default = False] (boolean)
- *critical_reactions* [default = [] ] (list) ONLY for the tau-leaping method where the user can pre-define reactions that are "critical". Critical reactions can fire only once per time step.
- *reaction_orders* [default = [] (list) ONLY for the tau-leaping method
- *species_HORs* [default = [] (list) ONLY for the tau-leaping method
- *species_max_influence* [default = []] (list) ONLY for the tau-leaping method
- *quiet* [default = False] suppress print statements
In the following, we will only use the Direct method as its variants are designed to reduce computational costs, which is not a concern for the simulations we will perform.
Performing a stochastic simulation using default parameters:
Info: 1 trajectory is generated
simulation done!
Info: Number of time steps 1000 End time 1.0951329075756742e-06
Info: Simulation time 0.01072
As in deterministic simulations, using a high number of molecules and initializing species copy number close to the fixed point, ensures that the system remains at the fixed point.
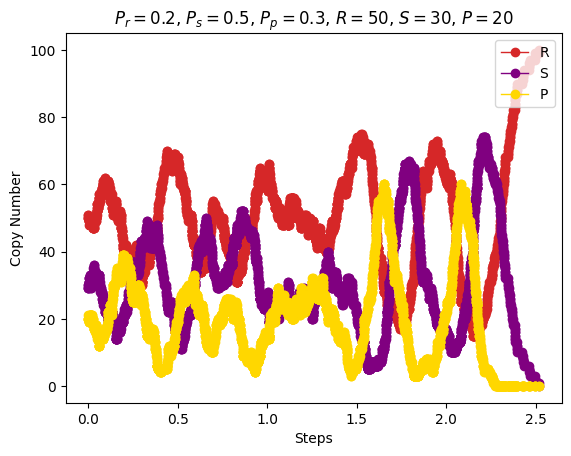
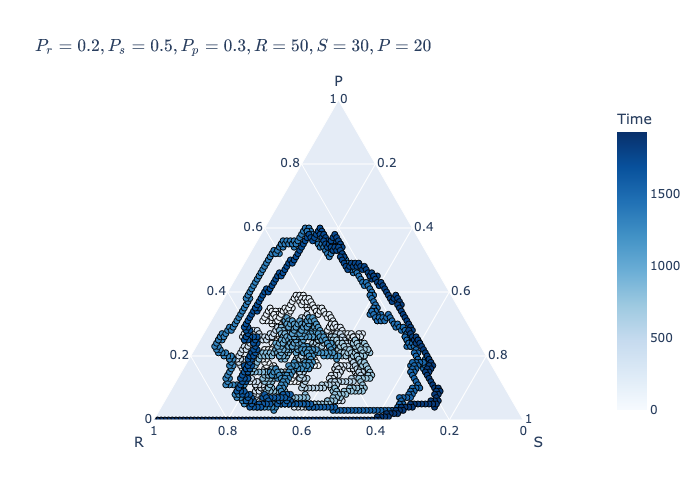
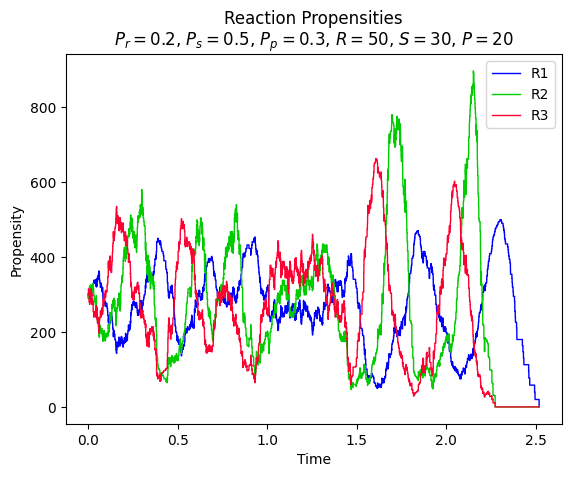
Performing a stochastic simulation with a lower number of molecules and tracking reaction propensities:
With fewer molecules, two species (scissors and paper) eventually become extinct, and the species that survives (rock) is the one that has the lowest invasion rate, similarly to the discrete-time model with a finite number of sites.
At \(t=0\), \(R1\) propensity is \(R\cdot S\cdot P_r=50\cdot 30\cdot 0.2=300\), \(R2\) propensity is \(S\cdot P\cdot P_s=30\cdot 20\cdot 0.5=300\) and \(R3\) propensity is \(P\cdot R\cdot P_p=20\cdot 50\cdot 0.3=300\), where \(R,S,P\) denote the number of molecules of each species. The propensities of the reactions are equal, which is expected as the system is at the fixed point. However, due to the stochastic nature of the model, the system quickly deviates from this point.
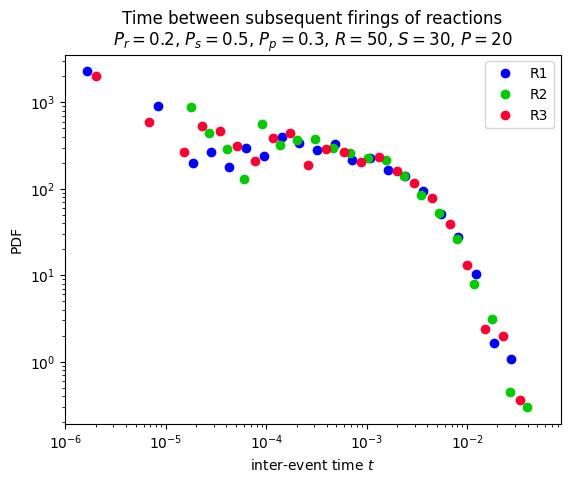
Plotting the time between two subsequent firings of a reaction:
Code
smod.PlotWaitingtimesDistributions(title='Time between subsequent firings of reactions\n$P_r=0.2$, $P_s=0.5$, $P_p=0.3$, $R=50$, $S=30$, $P=20$')smod.PrintWaitingtimesMeans()
Reaction Mean
R1 0.004
R2 0.004
R3 0.004
The three reactions have the same average time between two subsequent firings.
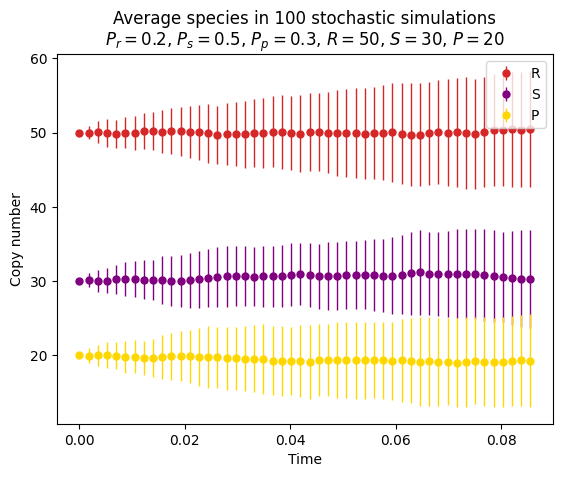
Alternatively, to approximate the deterministic behavior, we can perform multiple stochastic simulations and average the species copy numberss using a fixed regular time grid:
Code
smod.DoStochSim(end=100, trajectories=100)smod.GetRegularGrid(n_samples=50)smod.PlotAverageSpeciesTimeSeries( colors=["tab:red", "purple", "gold"], title="Average species in 100 stochastic simulations\n$P_r=0.2$, $P_s=0.5$, $P_p=0.3$, $R=50$, $S=30$, $P=20$")
Info: 100 trajectories are generated
Info: Time simulation output of the trajectories is stored at RSP_model(trajectory).dat in directory: /Users/irenetesta/Stochpy/temp
Info: Simulation time: 0.1466820240020752
To get an accurate prediction of the species distribution, StochPy provides the function DoCompleteStochSim() that continues the simulation until the first four moments converge within a user-specified error (default = 0.001):
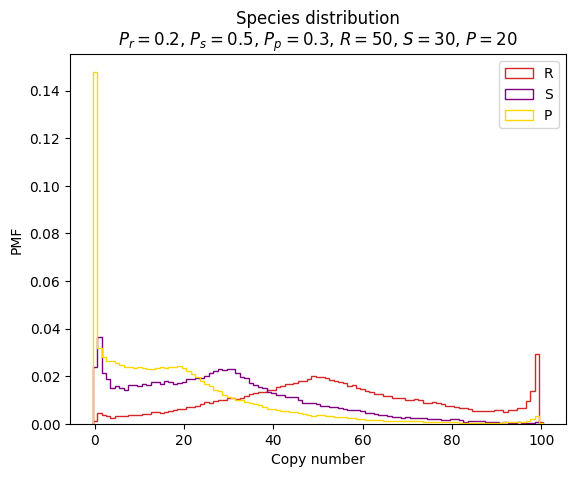
Species \(P\) probability mass is concentrated at lower values, while species \(R\) and \(S\) have a more uniform distribution.
Computing mean and standard deviation of the species copy number is not straightforward as the time between two events is not constant, thus it is necessary to track the time spent in each state for each species. This computation is implemented by the following functions:
Species Mean
R 53.108
S 28.366
P 18.526
Species Standard Deviation
R 23.734
S 19.751
P 18.520
The average copy number for each species is close to the fixed point.
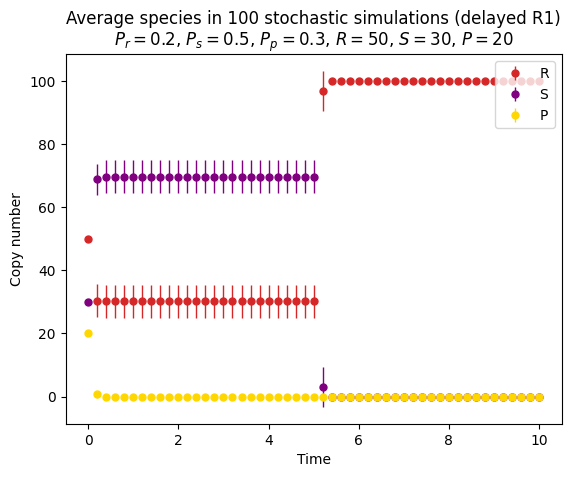
We can also experiment with delayed reactions, consisting of an exponential waiting time as initiation step with a subsequent delay time. We set a fixed delay of five seconds on reaction \(R1\) (\(R + S \rightarrow 2R\)). This means that after \(R1\) fires, it takes exactly five seconds before products are produced. By setting nonconsuming_reactions=["R1"], reactants are also consumed at completion.
Info: Delayed Direct Method is selected to perform delayed stochastic simulations.
Parsing file: ../long_range_models/RSP_model.psc
Info: No reagents have been fixed
Info: 100 trajectories are generated
Info: Time simulation output of the trajectories is stored at RSP_model(trajectory).dat in directory: /Users/irenetesta/Stochpy/temp
Info: Simulation time: 17.542798042297363 *** WARNING ***: No regular grid is created yet. Use GetRegularGrid(n_samples) if averaged results are unsatisfactory (e.g. more or less 'samples')
If \(R1\) is delayed, after the first five seconds, the system will reach the absorbing state where only species \(R\) is present.
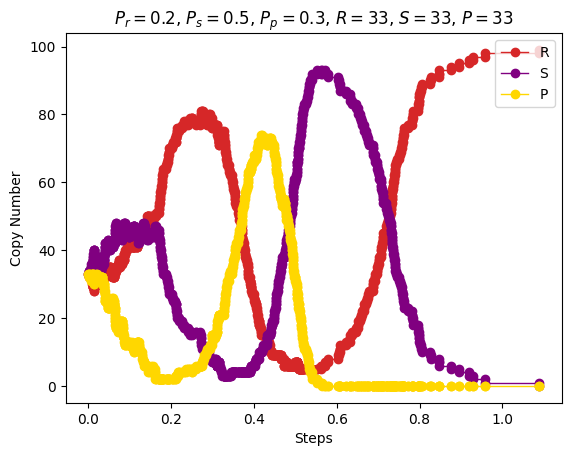
Performing a stochastic simulation with equal initial population densities:
Info: Direct method is selected to perform stochastic simulations.
Parsing file: ../long_range_models/RSP_model.psc
Info: No reagents have been fixed
Info: 1 trajectory is generated
simulation done!
Info: Number of time steps 469 End time 1.0884810590458118
Info: Simulation time 0.00366
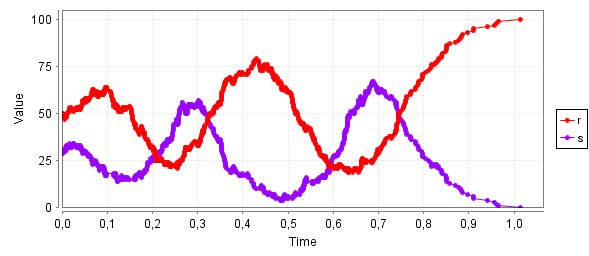
Differently from the simulation with ODEs, the system does not exhibit sustained oscillations; instead, the oscillation amplitude increases over time, ultimately leading to the extinction of two species.
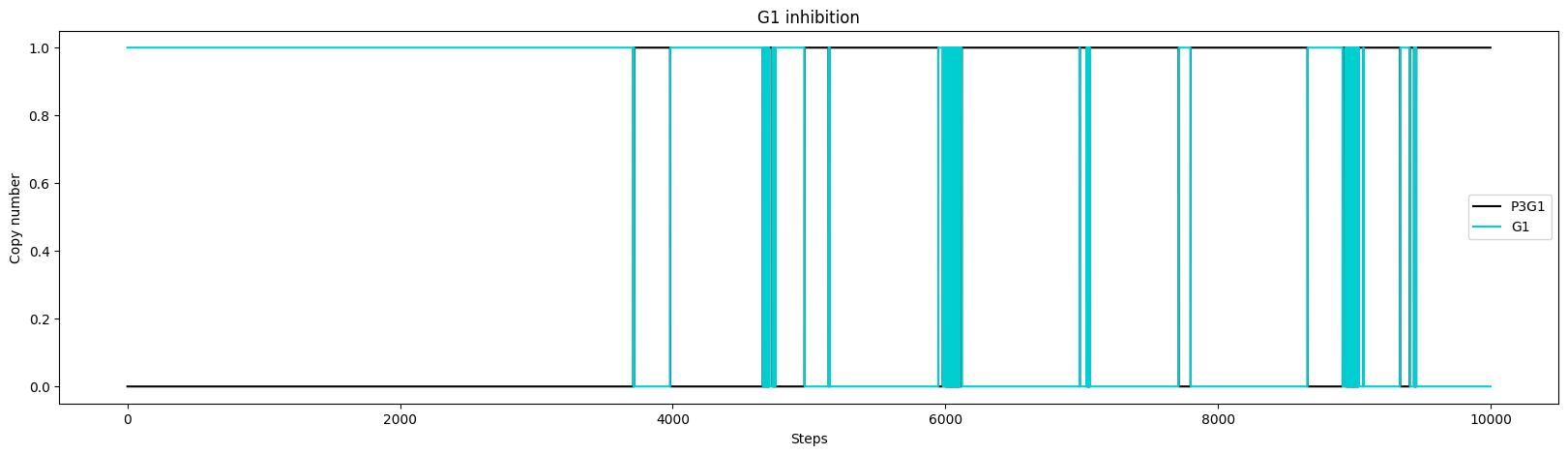
Genetic Network with Negative Feedback Loop
A suitable case study for stochastic simulations is a genetic network consisting of a feedback loop involving three genes. In this system, each gene encodes a protein that represses the expression of the subsequent gene in the loop, similar to the dynamics seen in the rock-paper-scissors game. This genetic network is known as a Repressilator; for a detailed analysis, see here.
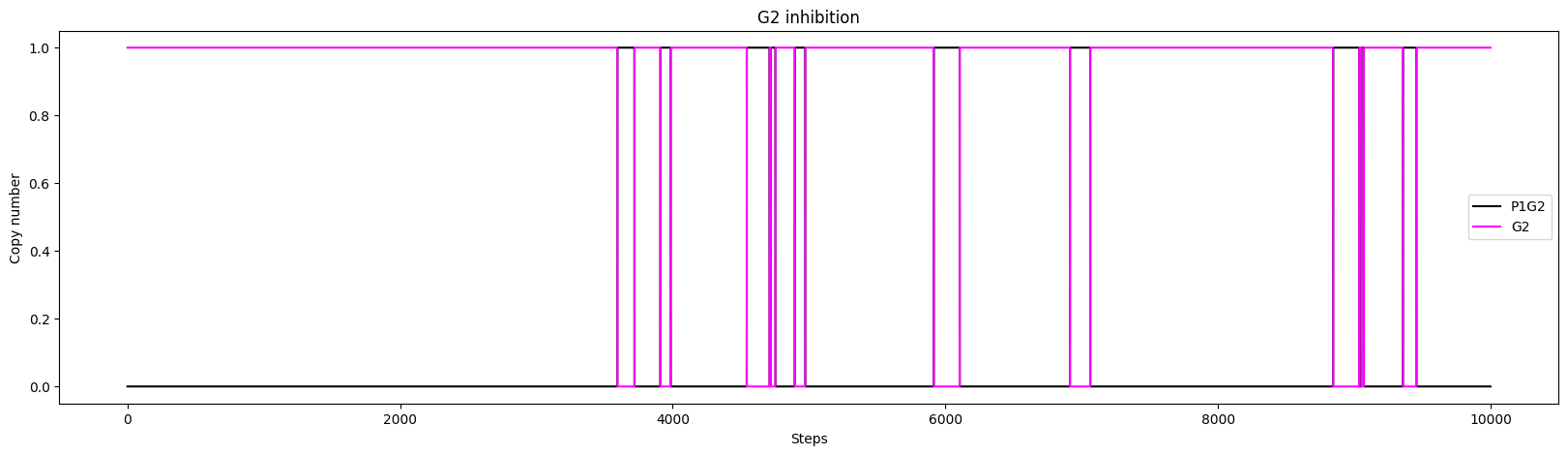
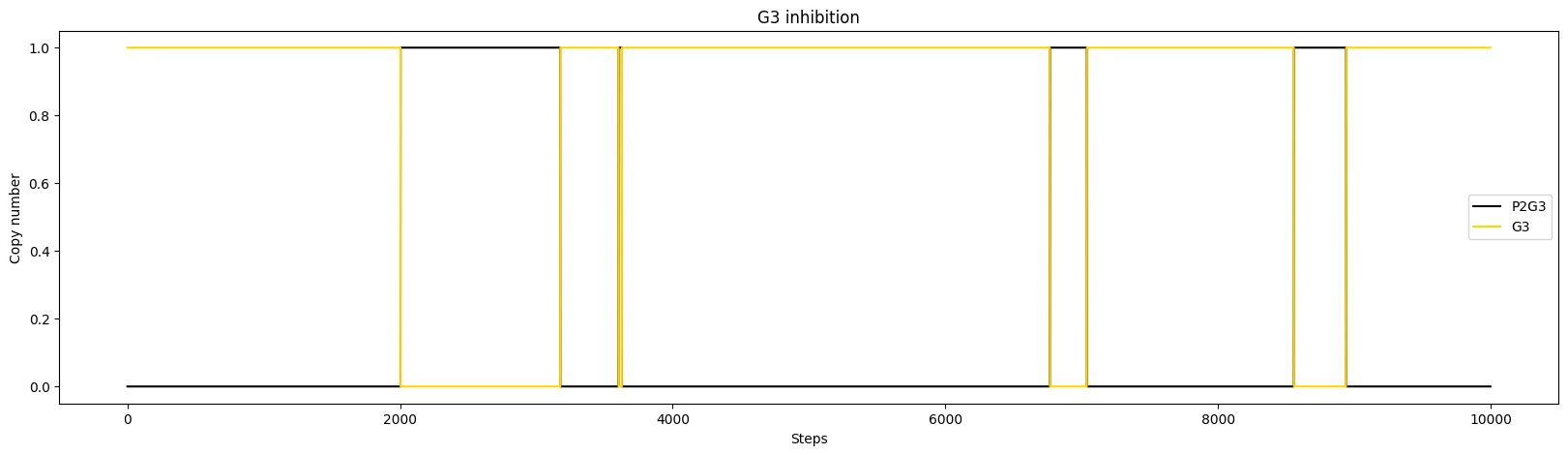
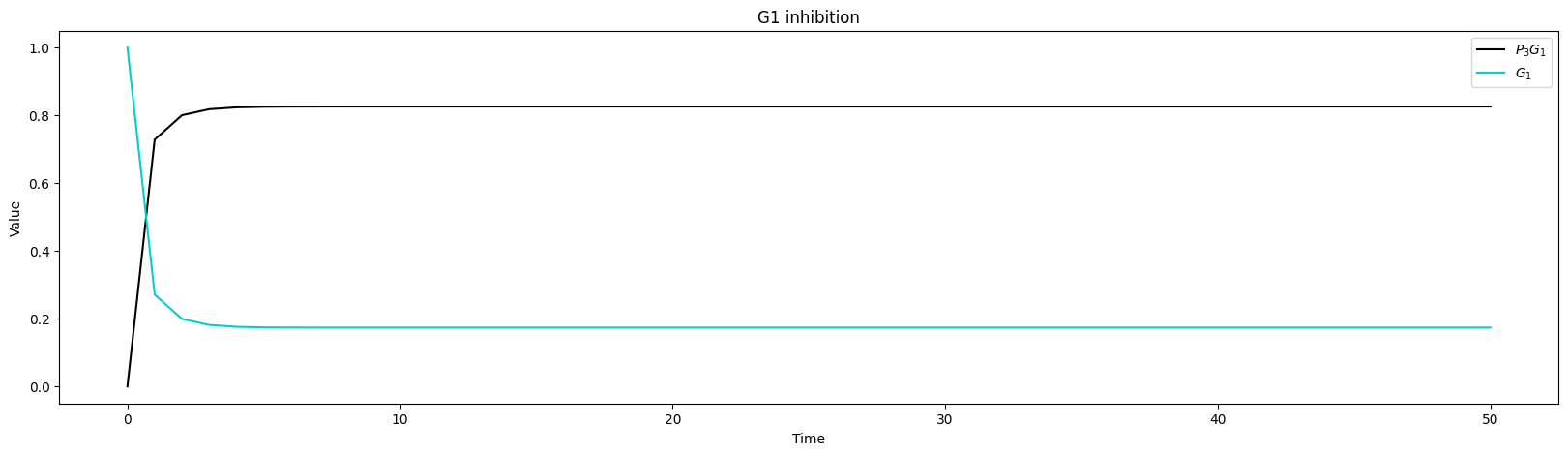
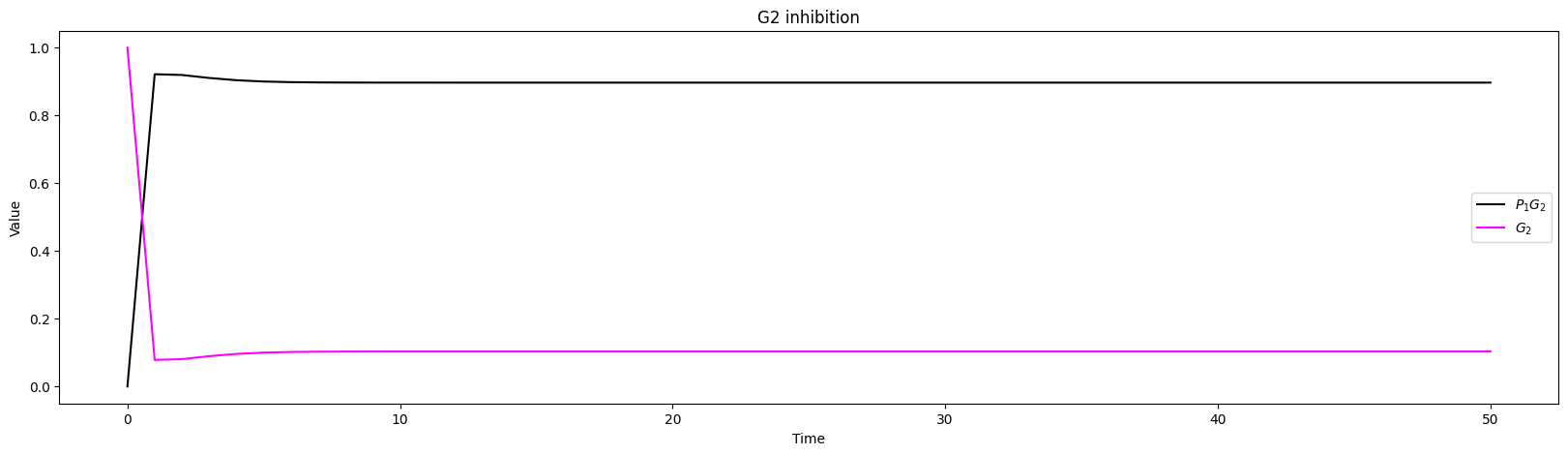
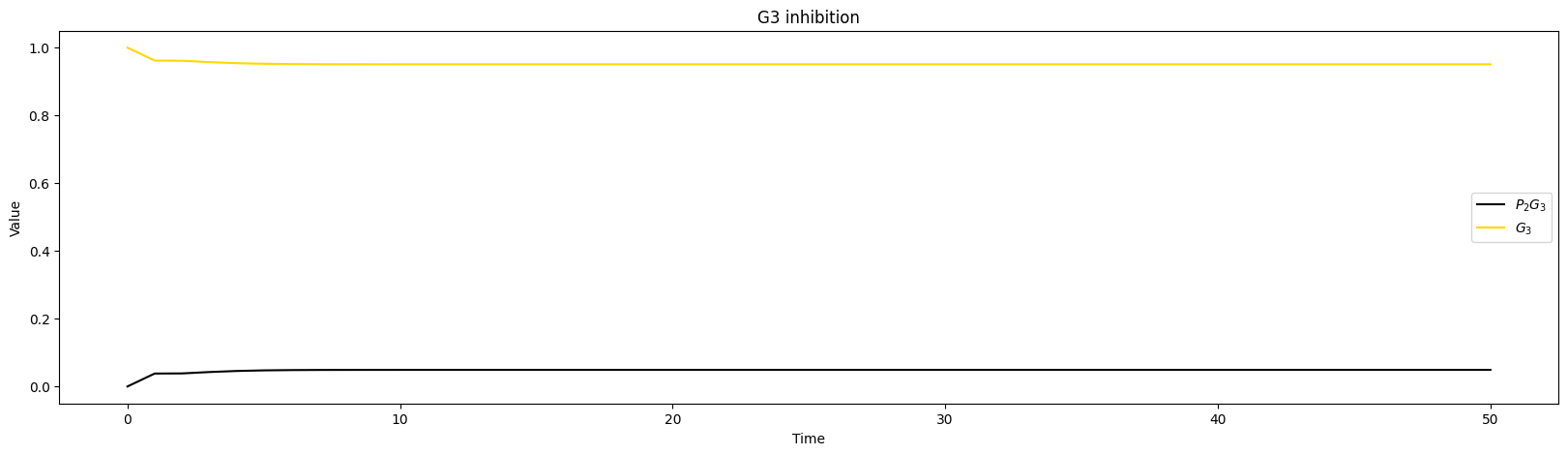
Each gene produces a protein (reactions \((1), (2), (3)\)), which can interact with the next gene in the loop to inhibit its expression (reactions \((4), (5), (6)\), forward reactions). This inhibition creates a negative feedback loop, as each protein suppresses the activity of the subsequent gene in the sequence. The inhibition occurs when the protein binds to the gene, preventing it from synthesizing its associated protein. However, the protein-gene complex can dissociate, freeing the gene to resume protein production (reactions \((4), (5), (6)\), reverse reactions). Additionally, over time, the proteins degrade and disappear from the system (reactions \((7), (8), (9)\)).
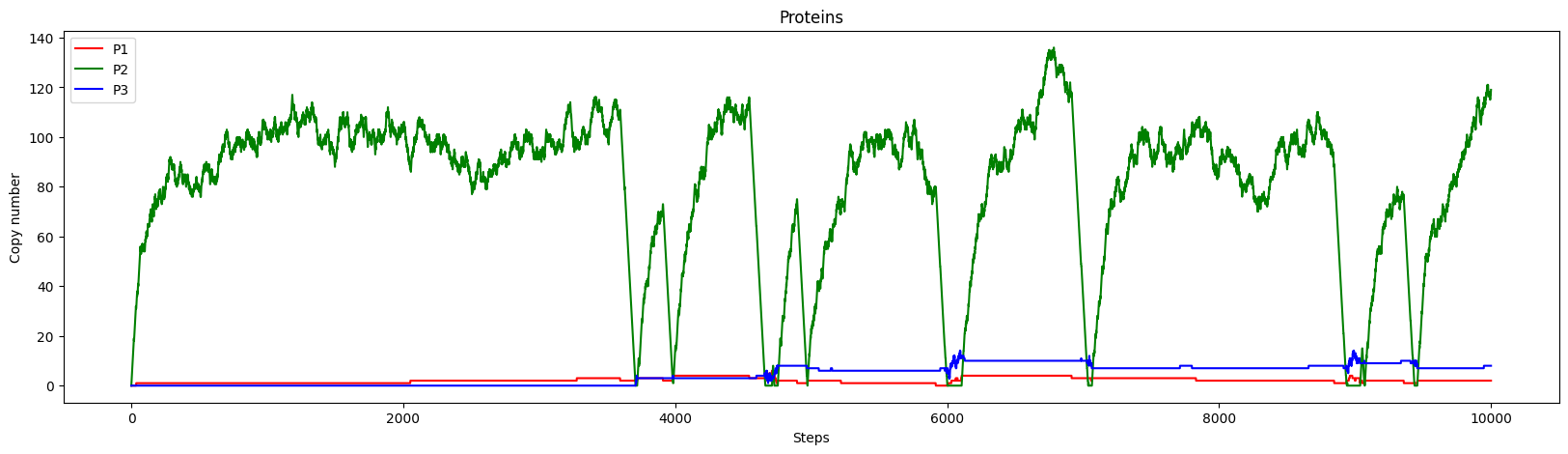
The system is initialized with a copy of each gene, no proteins and no protein-gene complexes. The reaction rates are set so that \(G2\) produces its protein much more rapidly, and this protein has a shorter lifespan, degrading at a faster rate.
Loading the model into StochPy and performing a stochastic simulation:
Info: Direct method is selected to perform stochastic simulations.
Parsing file: /Users/irenetesta/Stochpy/pscmodels/ImmigrationDeath.psc
Info: No reagents have been fixed
Parsing file: ../long_range_models/repressilator.psc
Info: No reagents have been fixed
Info: 1 trajectory is generated
simulation done!
Info: Number of time steps 10000 End time 6.3121454739530645
Info: Simulation time 0.18076
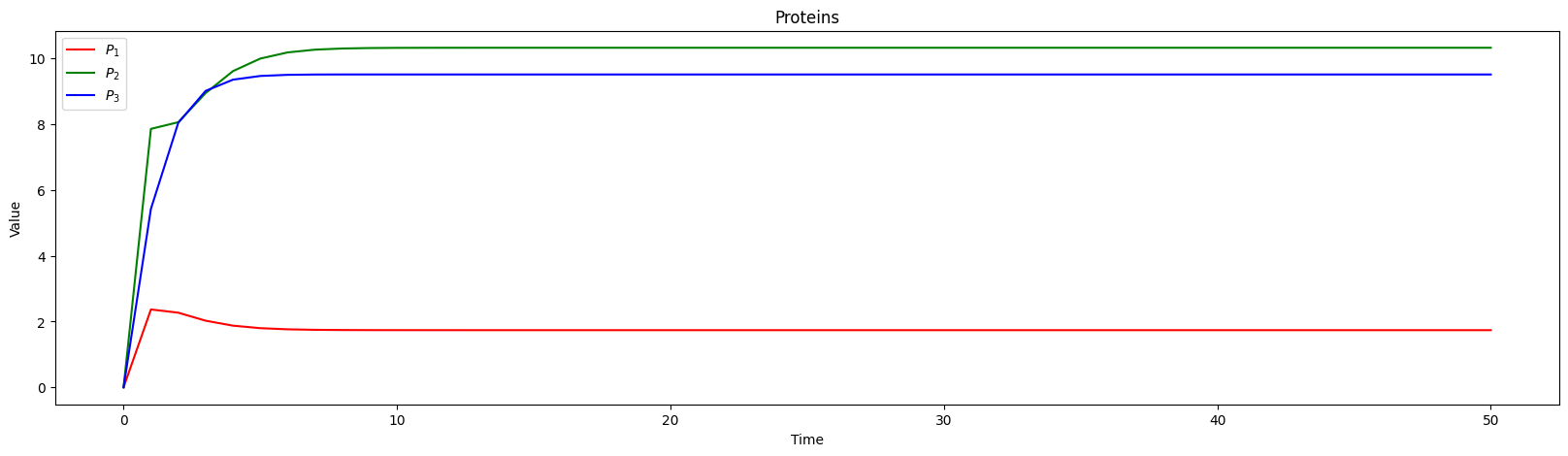
we would allow molecules to assume continuous values, meaning that genes and protein-gene complexes could take on values between \(0\) and \(1\), which does not accurately reflect the discrete nature of the system.
Defining a function to simulate the evolution of the system in the continuous setting:
Indeed, this simulation shows a completely different behavior. Over time, the negative feedback loop stabilizes the levels of all proteins, leading the system to reach a steady state. This dynamics does not occur in nature, as the system is inherently stochastic and discrete.
Stochastic model checking
Stochastic model checking enables the verification of properties in stochastic systems by quantifying their probabilities through systematic exploration of all possible system behaviors.
To perform stochastic model checking we need to translate the model into a Continuous Time Markov Chain (CTMC) and specify the properties we want to verify. Dynamical properties of the resulting CTMC could then be analyzed using the stochastic model checker PRISM.
PRISM represents CTMC states using a set of bounded integer variables, necessitating the assumption of a discrete state space. This discretization results in the following CTMC specification in PRISM’s input language (stored in the file ../long_range_models/RSP.prism), where model parameters are defined by Pr, Ps and Pp constants (initialized with the same values used in the previous simulations), MAX is the maximum number of molecules per species (set to 100 due to the prohibitive computational time required for higher values) and we have three transitions describing the three possible reactions:
Noting that r + s + p = 100, we can simplify the model to reduce computational time by eliminating the variable p. This results in the following PRISM input:
PRISM saves the results in a log file, which we can load and analyze:
Code
!sed -n '9,128p' ../results/prism_log.txt
Type: CTMC
Modules: RSP
Variables: r s
---------------------------------------------------------------------
Model checking: P=? [ F r=0 ]
Building model...
Computing reachable states...
Reachability (BFS): 121 iterations in 0.00 seconds (average 0.000000, setup 0.00)
Time for model construction: 0.124 seconds.
Warning: Deadlocks detected and fixed in 3 states
Type: CTMC
States: 5151 (1 initial)
Transitions: 14853
Rate matrix: 44090 nodes (3611 terminal), 14853 minterms, vars: 14r/14c
Diagonals vector: 7997 nodes (2482 terminal), 5151 minterms
Embedded Markov chain: 72269 nodes (13625 terminal), 14853 minterms
Prob0: 100 iterations in 0.03 seconds (average 0.000310, setup 0.00)
Prob1: 99 iterations in 0.06 seconds (average 0.000626, setup 0.00)
yes = 200, no = 100, maybe = 4851
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=14, nodes=72180] [3.3 MB]
Adding explicit sparse matrices... [levels=14, num=1, compact] [168.3 KB]
Creating vector for diagonals... [dist=1, compact] [10.1 KB]
Creating vector for RHS... [dist=2, compact] [10.1 KB]
Allocating iteration vectors... [2 x 40.2 KB]
TOTAL: [3.6 MB]
Starting iterations...
Jacobi: 5067 iterations in 4.03 seconds (average 0.000043, setup 3.81)
Value in the initial state: 0.1412982989479114
Time for model checking: 5.41 seconds.
Result: 0.1412982989479114 (+/- 1.4120125376176834E-6 estimated; rel err 9.993131892820674E-6)
---------------------------------------------------------------------
Model checking: P=? [ F s=0 ]
Diagonals vector: 7997 nodes (2482 terminal), 5151 minterms
Embedded Markov chain: 72269 nodes (13625 terminal), 14853 minterms
Prob0: 100 iterations in 0.06 seconds (average 0.000620, setup 0.00)
Prob1: 99 iterations in 0.02 seconds (average 0.000162, setup 0.00)
yes = 200, no = 100, maybe = 4851
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=14, nodes=72180] [3.3 MB]
Adding explicit sparse matrices... [levels=14, num=1, compact] [168.3 KB]
Creating vector for diagonals... [dist=1, compact] [10.1 KB]
Creating vector for RHS... [dist=2, compact] [10.1 KB]
Allocating iteration vectors... [2 x 40.2 KB]
TOTAL: [3.6 MB]
Starting iterations...
Jacobi: 5098 iterations in 2.55 seconds (average 0.000022, setup 2.44)
Value in the initial state: 0.9829185886675442
Time for model checking: 5.287 seconds.
Result: 0.9829185886675442 (+/- 9.824397199114573E-6 estimated; rel err 9.995128093398498E-6)
---------------------------------------------------------------------
Model checking: P=? [ F (MAX-r-s)=0 ]
Diagonals vector: 7997 nodes (2482 terminal), 5151 minterms
Embedded Markov chain: 72269 nodes (13625 terminal), 14853 minterms
Prob0: 100 iterations in 0.08 seconds (average 0.000780, setup 0.00)
Prob1: 99 iterations in 0.00 seconds (average 0.000000, setup 0.00)
yes = 200, no = 100, maybe = 4851
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=14, nodes=72180] [3.3 MB]
Adding explicit sparse matrices... [levels=14, num=1, compact] [168.3 KB]
Creating vector for diagonals... [dist=1, compact] [10.1 KB]
Creating vector for RHS... [dist=2, compact] [10.1 KB]
Allocating iteration vectors... [2 x 40.2 KB]
TOTAL: [3.6 MB]
Starting iterations...
Jacobi: 5108 iterations in 2.09 seconds (average 0.000028, setup 1.95)
Value in the initial state: 0.8745308920684021
Time for model checking: 5.281 seconds.
Result: 0.8745308920684021 (+/- 8.735542417834342E-6 estimated; rel err 9.988832295190192E-6)
---------------------------------------------------------------------
By inspecting the log file, we can see that the model has \(5151\) states and \(14853\) transitions.
The probabilities of extinction for species r, s, and p are \(0.14\), \(0.98\), and \(0.87\), respectively. Again, the population with the lowest invasion rate is the least likely to become extinct.
Loading subsequent lines of PRISM log file:
Code
!sed -n '128,294p' ../results/PRISM_log.txt
---------------------------------------------------------------------
Model checking: P=? [ F (r>70&(F r=0)) ]
Building model...
Computing reachable states...
Reachability (BFS): 121 iterations in 0.00 seconds (average 0.000000, setup 0.00)
Time for model construction: 0.249 seconds.
Warning: Deadlocks detected and fixed in 3 states
Type: CTMC
States: 5151 (1 initial)
Transitions: 14853
Rate matrix: 44090 nodes (3611 terminal), 14853 minterms, vars: 14r/14c
Building deterministic automaton (for F ("L0"&(F "L1")))...
DFA has 3 states, 1 goal states.
Time for deterministic automaton translation: 0.066 seconds.
Constructing MC-DFA product...
Reachability (BFS): 184 iterations in 0.20 seconds (average 0.001103, setup 0.00)
States: 9837 (1 initial)
Transitions: 28429
Transition matrix: 44168 nodes (3611 terminal), 28429 minterms, vars: 16r/16c
Skipping BSCC computation since acceptance is defined via goal states...
Computing reachability probabilities...
Diagonals vector: 8038 nodes (2485 terminal), 9837 minterms
Embedded Markov chain: 72347 nodes (13625 terminal), 28429 minterms
Prob0: 211 iterations in 0.17 seconds (average 0.000815, setup 0.00)
Prob1: 99 iterations in 0.11 seconds (average 0.001111, setup 0.00)
yes = 200, no = 341, maybe = 9296
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=16, nodes=72287] [3.3 MB]
Adding explicit sparse matrices... [levels=16, num=1, compact] [225.0 KB]
Creating vector for diagonals... [dist=1, compact] [19.2 KB]
Creating vector for RHS... [dist=2, compact] [19.2 KB]
Allocating iteration vectors... [2 x 76.9 KB]
TOTAL: [3.7 MB]
Starting iterations...
Jacobi: 5067 iterations in 3.73 seconds (average 0.000093, setup 3.27)
Value in the initial state: 0.1412776387650012
Time for model checking: 6.556 seconds.
Result: 0.1412776387650012
---------------------------------------------------------------------
Model checking: P=? [ F (s>70&(F s=0)) ]
Building deterministic automaton (for F ("L0"&(F "L1")))...
DFA has 3 states, 1 goal states.
Time for deterministic automaton translation: 0.0 seconds.
Constructing MC-DFA product...
Reachability (BFS): 234 iterations in 0.16 seconds (average 0.000671, setup 0.00)
States: 9837 (1 initial)
Transitions: 28429
Transition matrix: 51246 nodes (3611 terminal), 28429 minterms, vars: 16r/16c
Skipping BSCC computation since acceptance is defined via goal states...
Computing reachability probabilities...
Diagonals vector: 9535 nodes (2483 terminal), 9837 minterms
Embedded Markov chain: 78292 nodes (13625 terminal), 28429 minterms
Prob0: 211 iterations in 0.09 seconds (average 0.000445, setup 0.00)
Prob1: 99 iterations in 0.03 seconds (average 0.000313, setup 0.00)
yes = 200, no = 341, maybe = 9296
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=16, nodes=83176] [3.8 MB]
Adding explicit sparse matrices... [levels=16, num=1, compact] [225.0 KB]
Creating vector for diagonals... [dist=1, compact] [19.2 KB]
Creating vector for RHS... [dist=2, compact] [19.2 KB]
Allocating iteration vectors... [2 x 76.9 KB]
TOTAL: [4.2 MB]
Starting iterations...
Jacobi: 5299 iterations in 3.72 seconds (average 0.000071, setup 3.34)
Value in the initial state: 0.6206821903214073
Time for model checking: 6.679 seconds.
Result: 0.6206821903214073
---------------------------------------------------------------------
Model checking: P=? [ F ((MAX-r-s)>70&(F (MAX-r-s)=0)) ]
Building deterministic automaton (for F ("L0"&(F "L1")))...
DFA has 3 states, 1 goal states.
Time for deterministic automaton translation: 0.002 seconds.
Constructing MC-DFA product...
Reachability (BFS): 224 iterations in 0.05 seconds (average 0.000210, setup 0.00)
States: 9837 (1 initial)
Transitions: 28429
Transition matrix: 50423 nodes (3611 terminal), 28429 minterms, vars: 16r/16c
Skipping BSCC computation since acceptance is defined via goal states...
Computing reachability probabilities...
Diagonals vector: 9510 nodes (2484 terminal), 9837 minterms
Embedded Markov chain: 78176 nodes (13625 terminal), 28429 minterms
Prob0: 211 iterations in 0.11 seconds (average 0.000517, setup 0.00)
Prob1: 99 iterations in 0.06 seconds (average 0.000636, setup 0.00)
yes = 200, no = 341, maybe = 9296
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=16, nodes=81499] [3.7 MB]
Adding explicit sparse matrices... [levels=16, num=1, compact] [225.0 KB]
Creating vector for diagonals... [dist=1, compact] [19.2 KB]
Creating vector for RHS... [dist=2, compact] [19.2 KB]
Allocating iteration vectors... [2 x 76.9 KB]
TOTAL: [4.1 MB]
Starting iterations...
Jacobi: 5381 iterations in 4.31 seconds (average 0.000096, setup 3.80)
Value in the initial state: 0.26793012102126795
Time for model checking: 6.495 seconds.
Result: 0.26793012102126795
---------------------------------------------------------------------
The probability of a species to go extinct after having reached a density of \(0.7\) is \(0.14\) for species r, \(0.62\) for species s, and \(0.27\) for species p. If species sand p reach a density of \(0.7\), they are less likely to become extinct in the future as compared to the extinction probability of these species from the initial state.
Loading subsequent lines of PRISM log file:
Code
!sed -n '295,391p' ../results/PRISM_log.txt
Model checking: P=? [ F s=0&r=0 ]
Diagonals vector: 7997 nodes (2482 terminal), 5151 minterms
Embedded Markov chain: 72269 nodes (13625 terminal), 14853 minterms
Prob0: 198 iterations in 0.05 seconds (average 0.000237, setup 0.00)
Prob1: 50 iterations in 0.01 seconds (average 0.000300, setup 0.00)
yes = 100, no = 200, maybe = 4851
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=14, nodes=72180] [3.3 MB]
Adding explicit sparse matrices... [levels=14, num=1, compact] [168.3 KB]
Creating vector for diagonals... [dist=1, compact] [10.1 KB]
Creating vector for RHS... [dist=2, compact] [10.1 KB]
Allocating iteration vectors... [2 x 40.2 KB]
TOTAL: [3.6 MB]
Starting iterations...
Jacobi: 5060 iterations in 2.31 seconds (average 0.000015, setup 2.23)
Value in the initial state: 0.12484498983774625
Time for model checking: 5.309 seconds.
Result: 0.12484498983774625 (+/- 1.2472498654345966E-6 estimated; rel err 9.990387816568165E-6)
---------------------------------------------------------------------
Model checking: P=? [ F r=0&(MAX-r-s)=0 ]
Diagonals vector: 7997 nodes (2482 terminal), 5151 minterms
Embedded Markov chain: 72269 nodes (13625 terminal), 14853 minterms
Prob0: 198 iterations in 0.00 seconds (average 0.000000, setup 0.00)
Prob1: 50 iterations in 0.01 seconds (average 0.000300, setup 0.00)
yes = 100, no = 200, maybe = 4851
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=14, nodes=72180] [3.3 MB]
Adding explicit sparse matrices... [levels=14, num=1, compact] [168.3 KB]
Creating vector for diagonals... [dist=1, compact] [10.1 KB]
Creating vector for RHS... [dist=2, compact] [10.1 KB]
Allocating iteration vectors... [2 x 40.2 KB]
TOTAL: [3.6 MB]
Starting iterations...
Jacobi: 5141 iterations in 2.62 seconds (average 0.000030, setup 2.47)
Value in the initial state: 0.01645373692597371
Time for model checking: 5.285 seconds.
Result: 0.01645373692597371 (+/- 1.6439874796782045E-7 estimated; rel err 9.991575087620501E-6)
---------------------------------------------------------------------
Model checking: P=? [ F (MAX-r-s)=0&s=0 ]
Diagonals vector: 7997 nodes (2482 terminal), 5151 minterms
Embedded Markov chain: 72269 nodes (13625 terminal), 14853 minterms
Prob0: 198 iterations in 0.05 seconds (average 0.000237, setup 0.00)
Prob1: 50 iterations in 0.00 seconds (average 0.000000, setup 0.00)
yes = 100, no = 200, maybe = 4851
Computing remaining probabilities...
Engine: Hybrid
Building hybrid MTBDD matrix... [levels=14, nodes=72180] [3.3 MB]
Adding explicit sparse matrices... [levels=14, num=1, compact] [168.3 KB]
Creating vector for diagonals... [dist=1, compact] [10.1 KB]
Creating vector for RHS... [dist=2, compact] [10.1 KB]
Allocating iteration vectors... [2 x 40.2 KB]
TOTAL: [3.6 MB]
Starting iterations...
Jacobi: 5107 iterations in 1.92 seconds (average 0.000006, setup 1.89)
Value in the initial state: 0.8580768529067467
Time for model checking: 5.346 seconds.
Result: 0.8580768529067467 (+/- 8.574549754478324E-6 estimated; rel err 9.992752660128196E-6)
The probability that each species will outcompete the other two (corresponding to an absorbing state, i.e. a state where no further transitions are possible) is \(0.12\) for species p, \(0.02\) for species s, and \(0.86\) for species r (since they sum to \(1\), the system will reach an absorbing state with certainty).
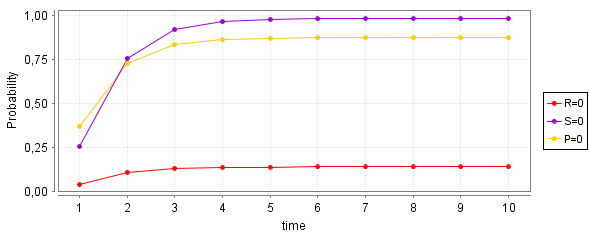
By varying the constant time between \(1\) and \(10\), we can plot the extinction probabilities for each species, i.e.:
Rock, the species with the lowest invasion rate, is the most likely to survive. This result is due to the finiteness of the populations, which prevents the system to remain close to the fixed point.
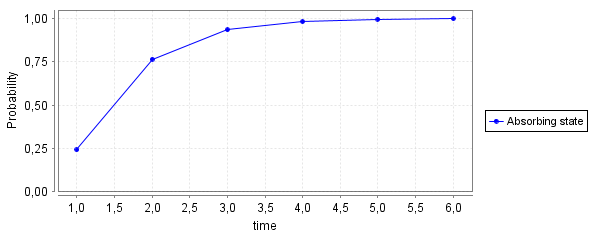
We can also plot the probability of reaching any absorbing state within the first \(6\) time units, i.e.:
After only \(5\) time steps, the system reaches an absorbing state with certainty.
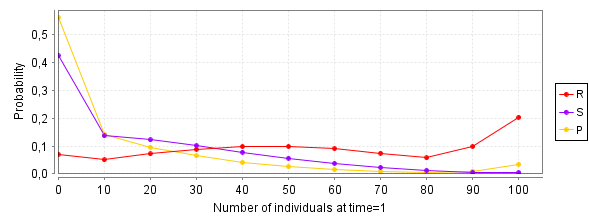
By binning the number of individuals in disjoint intervals (\(x <= \text{number of individuals} < x+10\)), we can plot the probabilities for each species being in a certain interval at time \(t=1\), i.e.:
After a time step, the probability mass for the number of individuals of species s and p is concentrated at lower values, while species r has a more uniform distribution.
PRISM can also be used to conduct stochastic simulations. For example, here is a simulation of the system where, similar to the simulation performed with StochPy, species r is the only one to survive.
Petri net analysis
A graphical representation of a system of chemical reactions can also be given in terms of Petri nets. Several variants of Petri nets exist, here we consider stochastic Petri nets, a variant that allows the modeling of stochastic systems.
For the rock-scissors-paper model, analyzing the net through property verification is relatively straightforward and doesn’t provide substantial insights. However, we will carry out this verification as a tutorial to illustrate the step-by-step approach to modeling and analyzing more complex biochemical networks.
The Petri net representing the system was created using the Snoopy tool, saved as ./long_range_models/rsp.spn, and subsequently imported into the Charlie tool for analysis.
Let’s introduce some definitions, necessary for the analysis of the Petri net.
A Stochastic Petri net consists of places, transitions with corresponding kinetic functions, arcs and tokens. Places represent the species, transitions represent the reactions, arcs represent the flow of species between reactions and tokens represent the number of molecules of each species. The distribution of the tokens in the places is formalized by the notion of marking.
More formally, a stochastic Petri net is a quintuple \(N = (P, T, f, \nu, m_0)\), where
\(P\) and \(T\) are finite, non empty, and disjoint sets. \(P\) is the set of places (in the figures represented by circles). \(T\) is the set of transitions (in the figures represented by rectangles);
\(f : ((P \times T)\cup (T \times P)) \rightarrow \mathbb{N}_0\) defines the set of directed arcs, weighted by nonnegative integer values;
\(\nu:T \rightarrow \Psi\), with \(\Psi=M\rightarrow R\geq 0\), is a function that assigns to each transition a function corresponding to the computation of a kinetic formula to every possible marking \(m \in M\);
\(m_0 \in M: P \rightarrow \mathbb{N}_0\) gives the initial marking.
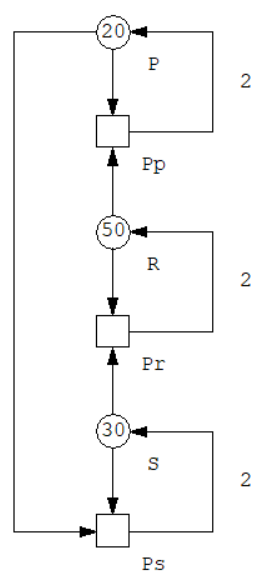
The stochastic Petri net for the rock-scissor-paper system is shown below, where we set the initial marking \(P=20, R=50, S=30\) and made the kinetic functions correspond to the law of mass action with constants equal to the invasion rates \(P_r=0.2\), \(P_s=0.5\) and \(P_p=0.3\):
The preset of a node\(x\in P \cup T\) is defined as \(•x:=\{y\in P\cup T |f(y,x) \neq 0\}\), and its post set as \(x• :=\{y\in P \cup T| f(x,y) \neq 0\}\). Altogether we get four types of sets:
\(•t\), the preplaces of a transition \(t\), consisting of the reaction’s precursors
\(t•\), the postplaces of a transition \(t\), consisting of the reaction’s products
\(•p\), the pretransitions of a place \(p\), consisting of all reactions producing this species
\(p•\), the posttransitions of a place \(p\), consisting of all reactions consuming this species
Given a set of places \(S=p_1, p_2, \ldots\), the pre-transition of a set of places \(S\) is defined as \(•S=•p_1 \cup •p_2 \cup \ldots\), while the post-transition of a set of places \(S\) is defined as \(S•=p_1• \cup p_2• \cup \ldots\).
In this particular net, the pretransition and posttransition of the sites are as follows:
\(•P=\{Pp\}\)
\(•R=\{Pr\}\)
\(•S=\{Ps\}\)
\(P•=\{Pp,Ps\}\)
\(R•=\{Pr,Pp\}\)
\(S•=\{Ps,Pr\}\)
The incidence matrix of \(\mathcal{N}\) is a matrix \(C:P\times T \rightarrow \mathbb{Z}\), indexed by \(P\) and \(T\), such that \(C(p,t)=f(t,p)−f(p,t)\).
Loading the file containing the incidence matrix produced by Charlie:
A place vector (transition vector) is a vector \(x : P \rightarrow \mathbb{Z}\), indexed by \(P\) (\(y : T \rightarrow \mathbb{Z}\), indexed by \(T\)).
A place vector (transition vector) is called a P-invariant (T-invariant) if it is a nontrivial nonnegative integer solution of the linear equation system \(x \cdot C = 0\) (\(C \cdot y = 0\)).
If \(p\) is a P-invariant, then the weighted sum of tokens across the places (using the weights specified by the p-invariant) is preserved under the firing of transitions. If \(t\) is a T-invariant, then if you fire the transitions according to the vector \(t\) (where the number of times each transition is fired is given by the corresponding entry in \(t\)), the net’s marking will remain unchanged.
Any vector of the form \([x,x,x]\) is a place invariant. In fact it is trivial that the sum of the number of tokens in the places is constant (equal to \(100\)).
Checking the file containing the P-invariants computed by Charlie:
Any vector of the form \([y,y,y]\) is a transition invariant. In fact it is trivial that applying the three transitions an equal number of times will not change the marking of the net.
Checking the file containing the T-invariants computed by Charlie:
The vector \([1, 1, 1]\) is a P-invariant for any multiplicative constants.
All markings, which can be reached from a given marking \(m\) by any firing sequence of arbitrary length, constitute the set of reachable markings\([m⟩\). For this specific net, the set of reachable markings is straightforward to compute: it consists of all possible triples of elements less than \(100\) that sum to \(100\).
A transition\(t\) is dead in the marking \(m\) if it is not enabled in any marking \(m^{\prime}\) reachable from \(m\): \(\nexists m^{\prime} \in [m⟩ : m^{\prime}[t⟩\). A transition\(t\) is live if it is not dead in any marking reachable from \(m_0\).
A marking\(m\) is dead if there is no transition which is enabled in \(m\).
A nonempty set of places \(D \subseteq P\) is called siphon if \(•D \subseteq D•\) (the set of pretransitions is contained in the set of posttransitions), i.e. every transition which fires tokens onto a place in this structural deadlock set, also has a preplace in this set.
In this particular net, we have:
\(•\{P\} = \{Pp\} \subseteq \{P\}•=\{Pp, Ps\} \implies \{P\}\) is a siphon
\(•\{R\} = \{Pr\} \subseteq \{R\}•=\{Pr, Pp\} \implies \{R\}\) is a siphon
\(•\{S\} = \{Ps\} \subseteq \{S\}•=\{Ps, Pr\} \implies \{S\}\) is a siphon
\(•\{R,S\}=\{Pr, Ps\} \subseteq \{R,S\}•=\{Pr, Pp, Ps\} \implies \{R,S\}\) is a siphon
\(•\{P, R\} = \{Pp, Pr\} \subseteq \{P, R\}• = \{Pp, Ps, Pr\} \implies \{P, R\}\) is a siphon
\(•\{P, S\} = \{Pp, Ps\} \subseteq \{P, S\}• = \{Pp, Ps, Pr\} \implies \{P, S\}\) is a siphon
Once a siphon becomes empty (i.e., contains no tokens), it cannot be refilled with tokens by the firing of any transitions (i.e. such part of the system becomes permanently disabled). This means that once a species (or a couple of species) goes extinct, it cannot be reintroduced in the system.
A siphon is minimal if it does not properly contain a non-empty siphon.
In this particular net, \(\{P\}, \{R\}, \{S\}\) are minimal siphons.
Checking the file containing the minimal siphons computed by Charlie:
A set of places \(Q \subseteq P\) is called trap if \(Q• \subseteq •Q\) (the set of posttransitions is contained in the set of pretransitions), i.e. every transition which subtracts tokens from a place of the trap set, also has a postplace in this set.
In this particular net, we have:
\(\{P\}•=\{Pp, Ps\} \nsubseteq •\{P\} = \{Pp\}\implies \{P\}\) is not a trap
\(\{R\}•=\{Pr, Pp\} \nsubseteq •\{R\} = \{Pr\} \implies \{R\}\) is not a trap
\(\{S\}•=\{Ps, Pr\} \nsubseteq •\{S\} = \{Ps\} \implies \{S\}\) is not a trap
\(\{R,S\}•=\{Pr, Pp, Ps\} \nsubseteq •\{R,S\}=\{Pr, Ps\} \implies \{R,S\}\) is not a trap
\(\{P, R\}• = \{Pp, Ps, Pr\} \nsubseteq •\{P, R\} = \{Pp, Pr\} \implies \{P, R\}\) is not a trap
\(\{P, S\}• = \{Pp, Ps, Pr\} \nsubseteq •\{P, S\} = \{Pp, Ps\} \implies \{P, S\}\) is not a trap
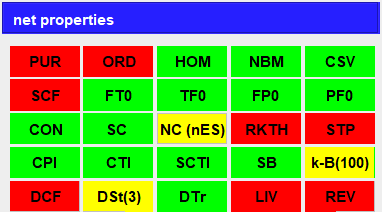
The “Net Properties” dialog in Charlie provides an overview of the key properties of the net. For this particular net, they are shown below:
The properties are described in the following Table (sourced from [3]).
Abbreviation
Name
Description
Status
PUR
pure
\(\forall x, y \in P \cup T : f (x, y) \neq 0 \implies f (y, x) = 0\), i.e. there are no two nodes, connected in both directions. This precludes read arcs. Then the net structure is fully represented by the incidence matrix, which is used for the calculation of the P- and T-invariants.
❌
ORD
ordinary
\(\forall x, y \in P \cup T : f (x, y) \neq 0 \implies f (x, y) = 1\), i.e. all arc weights are equal to 1. This includes homogeneity. A non-ordinary Petri net cannot be live and 1-bounded at the same time.
❌
HOM
homogeneous
\(\forall p \in P :t,t^{\prime} \in p• \implies f(p,t)=f(p,t^{\prime})\), i.e. all outgoing arcs of a given place have the same multiplicity.
✅
NBM
non blocking multiplicity
A net has non-blocking multiplicity if \(\forall p \in P :•p \neq \emptyset \land min\{f(t,p)\vert \forall t \in •p\}\geq max\{f(p,t)\vert \forall t \in p•\}\), i.e. an input place causes blocking multiplicity. Otherwise, it must hold for each place: the minimum of the multiplicities of the incoming arcs is not less than the maximum of the multiplicities of the outgoing arcs.
✅
CSV
conservative
A Petri net is conservative if \(\forall t \in T : \sum_{p \in •t} f(p,t) = \sum_{p \in t•} f(t,p)\) i.e. all transitions add exactly as many tokens to their postplaces as they subtract from their preplaces, or briefly, all transitions fire token-preservingly. A conservative Petri net is structurally bounded.
✅
SCF
structurally conflict free
A Petri net is static (or structurally) conflict free if \(\forall t,t^{\prime} \in T :t \neq t^{\prime} \implies •t \cap •t^{\prime} = \emptyset\), i.e. there are no two transitions sharing a preplace. Transitions involved in a static conflict compete for the tokens on shared preplaces. Thus, static conflicts indicate situations where dynamic conflicts, i.e. nondeterministic choices, may occur in the system behaviour. However, it depends on the token situation whether a conflict does actually occur dynamically. There is no nondeterminism in SCF nets.
❌
FT0
every transition has a pre-place
\(\forall t: •t \neq \emptyset\)
✅
TF0
every transition has a post-place
\(\forall t: t• \neq \emptyset\)
✅
FP0
every place has a pre-transition
\(\forall p: •p \neq \emptyset\)
✅
PF0
every place has a post-transition
\(\forall p: p• \neq \emptyset\)
✅
CON
connected
A Petri net is connected if it holds for every two nodes \(a\) and \(b\) that there is an undirected path between \(a\) and \(b\). Disconnected parts of a Petri net cannot influence each other, so they can usually be analyzed separately.
✅
SC
strongly connected
A Petri net is strongly connected if it holds for every two nodes \(a\) and \(b\) that there is a directed path from \(a\) to \(b\). Strong connectedness involves connectedness and the absence of boundary nodes. It is a necessary condition for a Petri net to be live and bounded at the same time.
✅
NC
netclass
The net structure class: 1) A Petri net is called State Machine (SM) if \(\forall t\in T :\vert •t \vert =\vert t•\vert \leq 1\), i.e. there are neither forward branching nor backward branching transitions. 2) A Petri net is called Synchronisation Graph (SG) if \(\forall p\in P :\vert •p\vert =\vert p•\vert \leq 1\), i.e. there are neither forward branching nor backward branching places. 3) A Petri net is called Extended Free Choice (EFC) if \(\forall p,q\in P:p• ∩q• =\emptyset \lor p• =q•\), i.e. transitions in conflict have identical sets of preplaces. 4) A Petri net is called Extended Simple (ES) if \(\forall p,q\in P:p• \cap q• =\emptyset \lor p• \subseteq q• \lor q• \subseteq p•\), i.e. every transition is involved in one conflict at most. 5) If the net does not comply to any of the introduced net structure classes, it is said to be not Extended Simple (nES).
nES
RKTH
rank theorem
\(rank(IM) \neq \vert SCCS\vert - 1 \implies !RKTH\), i.e. if the rank of the incidence matrix is not equal to the number of strongly connected components (maximal sets of strongly connected nodes) minus one, then the rank theorem does not hold.
❌
STP
siphon trap property
The siphon trap property holds if no siphons are bad. A siphon is called bad if it does not include a trap.
❌
CPI
covered by P-invariants
A net is covered by P-invariants, shortly CPI, if every place belongs to a P-invariant.
✅
CTI
covered by T-invariants
A net is covered by T-invariants, shortly CTI, if every transition belongs to a T-invariant.
✅
SCTI
strongly covered by T-invariants
The two transitions modelling the two directions of a reversible reaction always make a minimal T-invariant and they are called trivial T-invariants. A net which is covered by nontrivial T-invariants is said to be strongly covered by T-invariants.
✅
SB
structurally bounded
A net is structurally bounded if it is bounded for any initial marking
✅
k-B
k-bounded
A place \(p\) is k-bounded (bounded for short) if there exists a positive integer number \(k\), which represents an upper bound for the number of tokens on this place in all reachable markings of the Petri net: \(\exists k \in \mathbb{N}_0 :\forall m\in [m_0⟩:m(p)\leq k\). A Petri net is k-bounded (bounded for short) if all its places are k-bounded.
100
DCF
dynamically conflict free
Dynamic conflict is a behavioral property which refers to a marking enabling two transitions, but the firing of one transition disables the other one. The occurrence of dynamic conflicts causes alternative (branching) system behavior, whereby the decision between these alternatives is taken nondeterministically.
❌
DSt
no dead state(s)
True if the net does not have dead states (markings).
3
DTr
no dead transition(s)
If the net does not have dead transitions at the initial state.
✅
LIV
live
A Petri net is live (strongly live) if each transition is live.
❌
REV
reversible
A Petri net is reversible if the initial marking can be reached again from each reachable marking: \(\forall m \in [m_0⟩ : m_0 \in [m⟩\)
❌
Charlie checks these properties by applying a set of rules, as shown in the log file generated by the tool:
Code
!cat ../results/charlie_log.txt
starts analysis with following options:
charlie.analyzer.structural.StructuralOptionSet
number of places: 3
number of transitions: 3
number of arcs: 9
input places:
no input places
output places:
no output places
input transitions:
no input transitions
output transitions:
no output transitions
Structural coupled conflict sets:
1 |0.Pp :1,
|1.Pr :1,
|2.Ps :1
Structural equal conflict sets:
1 |0.Pp :1
2 |1.Pr :1
3 |2.Ps :1
time: 0 m 0 s
Applying rule:
CSV => k-B
Applying rule:
CSV => SB
Applying rule:
SC => CON
Applying rule:
CSV => CPI
Applying rule:
CPI => k-B
Applying rule:
SB => k-B
Applying rule:
CPI => SB
Analyzer: Rank of Matrix Analyzer
start time: 19/08/24, 15:09
starts analysis with following options:
charlie.analyzer.invariant.RankIncidenceMatrixOptionSet
Rank of the incidence matrix: 2
time: 00:00:00:013
Applying rule:
rank(IM) != |SCCS| - 1 => !RKTH
Analyzer: Structurally Bounded Analyzer
start time: 19/08/24, 15:09
starts analysis with following options:
GUI.app_components.StructurallyBoundedOptionSet
time: 00:00:00:013
Analyzer: InvariantAnalyzer
start time: 19/08/24, 15:10
starts analysis with following options:
Invariant Options:
compute: P-Invariants
delete Trivial Invariants: no
check coverage: yes
check extended coverage: no
enable MCSC: no
Invariant Analyzer: computing P-Invariants
minimal semipositive place invariants:
1
time: 00:00:00:014
Analyzer: InvariantAnalyzer
start time: 19/08/24, 15:10
starts analysis with following options:
Invariant Options:
compute: T-Invariants
delete Trivial Invariants: no
check coverage: yes
check extended coverage: yes
enable MCSC: no
Invariant Analyzer: computing T-Invariants
check coverage:
net is covered by T-Invariants
net does is support strong Coverage by T Invariants
minimal semipositive transition invariants:
1
time: 00:00:00:015
Analyzer: Trap Analyzer
start time: 19/08/24, 15:10
starts analysis with following options:
TrapOptions:
compute: true
export: false
exportFile: not set!
properSets: false
Trap Analyzer:
computed minimal traps
minimal traps:
1 minimal traps computed in 00:00:00:000
time: 00:00:00:008
Analyzer: Siphon Analyzer
start time: 19/08/24, 15:10
starts analysis with following options:
siphon options
Siphon Analyzer:
computing siphons
STP is not valid
counter examples:
siphon:
|0.P :1
is a bad siphon
1 siphons computed 00:00:00:000
time: 00:00:00:000
Analyzer: RGraph Simple Construction
start time: 19/08/24, 15:14
starts analysis with following options:
used construction options:
firing rule: single
boundedness check: yes
maximal construction depth: none
reduction: none
initial marking:(P: 20 | R: 50 | S: 30)
reachability graph analyzer:
computing rechability graph using simple firing rule
transition not live:
|0.Pp :1,
|1.Pr :1,
|2.Ps :1
transition dead at m0:
empty set
the net is not live
is not persistent
the net is not safe
number of dead states: 3
filter for dead states:
dead state 1: P== 100
dead state 2: R== 100
dead state 3: S== 100
-- reachability graph constructed in 00:00:52:162--
used construction options:
firing rule: single
boundedness check: yes
maximal construction depth: none
reduction: none
initial marking:(P: 20 | R: 50 | S: 30)
states: 5151
bound: 100
edges: 14850
#scc: 301
#terminal scc: 3
time: 00:00:52:162
Applying rule:
DSt => !LIV
Results:
PUR ORD HOM NBM CSV SCF FT0 TF0 FP0 PF0 CON SC NC
N N Y Y Y N Y Y Y Y Y Y nES
RKTH STP CPI CTI SCTI SB k-B 1-B DCF DSt DTr LIV REV
N N Y Y Y Y 100 N N 3 Y N N
SSI RNK SCCS SEQS
Y 2 1 3
Since a stochastic Petri net can be translated into a CTMC, Charlie provides the possibility to export the net in the PRISM input language. Let’s check whether the PRISM model produced by Charlie corresponds to the one we defined earlier:
Code
!cat ../long_range_models/rsp.sm
//created by Snoopy 2
//date: Sun Aug 18 14:58:29 2024
ctmc
const int Max;
const int N;
module rsp
S: [ 0..Max ] init 30*N;
R: [ 0..Max ] init 50*N;
P: [ 0..Max ] init 20*N;
[Pp]
(P > 0) & (R > 0)
-> (0.3) * P * R :
(P' = P+1) & (R' = R-1);
[Pr]
(R > 0) & (S > 0)
-> (0.2) * R * S :
(R' = R+1) & (S' = S-1);
[Ps]
(P > 0) & (S > 0)
-> (0.5) * S * P :
(P' = P-1) & (S' = S+1);
endmodule
Aside from the missing constraints on the variables’ maximum values, the model is identical to the one previously defined.
References
[1] Frean, Marcus, and Edward R. Abraham. “Rock–scissors–paper and the survival of the weakest.” Proceedings of the Royal Society of London. Series B: Biological Sciences 268.1474 (2001): 1323-1327.
[2] Weissing, Franz J. “Evolutionary stability and dynamic stability in a class of evolutionary normal form games.” Game equilibrium models I: evolution and game dynamics. Berlin, Heidelberg: Springer Berlin Heidelberg, 1991. 29-97.
[3] Heiner, Monika, David Gilbert, and Robin Donaldson. “Petri nets for systems and synthetic biology.” International school on formal methods for the design of computer, communication and software systems. Berlin, Heidelberg: Springer Berlin Heidelberg, 2008. 215-264.